


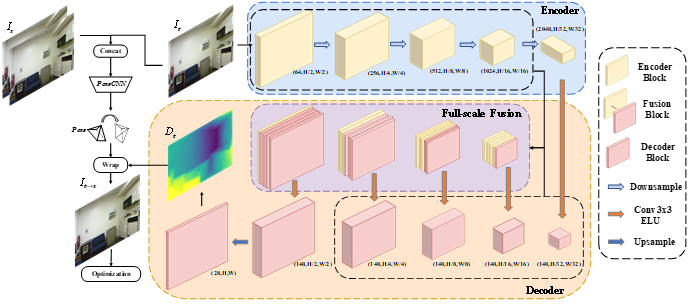
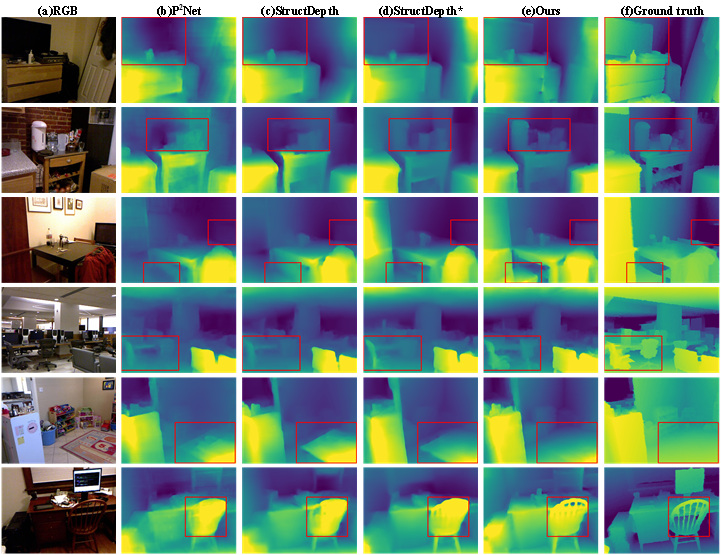
该文章针对目前的深度估计自监督算法应用于室内场景时,无法预测准确的深度,并可能导致边界失真的现象,提出了一种新颖的全尺度特征信息融合方法,包括全尺度跳接和全尺度特征融合块。这种方法可以在网络编码和解码过程中聚合所有尺度特征图的高层和低层信息,以弥补网络跨层特征信息的损失。所提出的全尺度特征融合提高了准确性,降低了解码器参数。为了充分发挥全尺度特征融合模块的优势,我们用更先进的 ResNeSt代替了 ResNet的编码器骨干。可显著提高预测精度。我们在室内基准数据集NYU Depth V2 和 ScanNet上对我们的方法进行了广泛评估。实验结果表明,我们的方法优于现有算法,特别是在NYU Depth V2数据集上,我们的精度提高到了83.8%。深度估计广泛应用于无人驾驶、三维重建、增强现实、点云图像生成等场景中,在智能矿山建设中的矿卡无人驾驶、井下真三维场景平台的构建和增强现实等领域具有广阔的应用前景。论文下载链接:https://link.springer.com/article/10.1007/s11042-023-16581-6

论文依托于国家自然科学基金项目“矿井复杂受限空间中低质图像增强方法研究”开展研究,该项目由中国矿业大学智能检测与模式识别研究中心核心成员承担。研究中心成立以来,发明了30多种面向矿井特殊作业环境的全矿井视频分析算法,研制了系列云-边-端协同分析的智能分析摄像仪,拥有多种针对煤矿场景下的图像处理相关的高质量论文、核心专利技术以及软件著作权等独立知识产权。
研究中心秉持专注人-机-环的作业安全和竭诚服务矿山本质安全的宗旨,主要面向有人员违章、环境参数异常、设备工作状态的监管需求的煤矿、非煤矿企业,提供安全生产场景的视频分析技术和边缘AI智能装备,践行服务煤矿安全生产的使命担当!


