


煤炭作为我国国民经济持续快速健康发展的重要基础能源和工业原料,一直扮演着不可或缺的角色。随着科技的发展,推动煤矿智能化建设已成为实现煤炭行业转型升级、推动煤炭生产技术革命、提高企业核心竞争力的必由之路。近年来,国家部委多次发布相关政策文件,要求加快提升矿山井下钻探装备的自动化、智能化水平。2019年,国家矿山安全监察局发布了《煤矿机器人重点研发目录》,明确支持井下抢险作业机器人、矿井救援机器人等救援装备;2020年,国家八部委印发了《关于加快煤矿智能化发展的指导意见》,大力推进矿山机器人研发及产业化应用,为矿山应急救援技术与装备研发指明了方向;2021年,国务院印发了《“十四五”国家应急体系规划》,在关键技术与装备研发重点专栏中明确提出支持极端或特殊环境下人体防护、机能增强装备研发。煤矿机器人的研发与应用为煤矿智能化发展提供了核心技术和装备支撑,通过机器人辅助甚至替代人力,减少煤矿井下一线危险繁重作业岗位的用工数量,对提高我国煤矿安全生产水平具有重要意义。
近年来,外骨骼机器人作为热门研究领域,由于其对人体的保护、帮助作用,逐步被引入煤炭行业,同时被希望进一步减少煤矿工人的工作损耗、监测工人的生命安全、提高工作效率。而在煤炭领域,针对独特、复杂的环境影响,外骨骼机器人通过防爆、防尘、减重等改进,已经成为能够辅助人工搬运工作的重要手段。
文章来源:《智能矿山》2024年第5期“专题报道:煤矿机器人技术与应用示范”专栏
作者简介:郦高亮,硕士研究生,主要从事机器人与智能制造装备技术研发工作
作者单位:煤炭科学研究总院
引用格式:郦高亮.煤矿外骨骼机器人的研发与应用[J].智能矿山,2024,5(5):53-57.

外骨骼机器人技术是一种结合机械工程、电子工程、计算机科学等多学科知识的前沿技术。其主要目的是通过在人体外部穿戴机械装置,增强人体力量、提升人体功能,从而达到增强人体工作能力、改善人体工作效率的目的。具体来说,矿用助力外骨骼机器人用来辅助矿工完成煤矿作业中的重体力劳动,如搬运、挖掘等。研发具有防护功能的外骨骼机器人,能够有效减少矿工在作业过程中受到伤害的风险;研发轻巧舒适的外骨骼机器人,能够减轻矿工长时间作业所带来的身体疲劳和不适,提高工作舒适度。此外,在灾后救援过程中,外骨骼装备也可显著增强救护队员机能,提高救护队员在搬运、拖拉、负重情况下的长距离行走能力。外骨骼机器人典型运动助力展示如图1所示。

图1 外骨骼机器人典型运动助力展示
当前成熟的外骨骼机器人设备已在医学、工业、军事等领域应用。煤矿助力外骨骼与普通工业外骨骼的主要区别在于需要结合煤矿特殊工作环境和矿工实际需求,开发出适用于煤矿行业的外骨骼机器人。由于在井下作业,需要对外骨骼机器人的硬件设备进行防爆设计,而对于井下复杂环境(如磁场、灰尘等影响),需要进一步增强外骨骼所用传感器的精确度,并加以保护,从而保证外骨骼的人机交互系统。目前,在外骨骼机器人领域尚未有相关行业标准,不同研究机构对外骨骼机器人的评价以使用者主观体验和关键零部件(如驱动器、传感器等)的性能参数为主。此外,部分整机指标(如外骨骼机器人的关节角度连续预测平均误差、运动状态预测时差、使用者的能量消耗降低率等)也会被用于评价外骨骼机器人的优劣。煤矿外骨骼机器人应用与设计技术路线如图2所示。

图2 煤矿外骨骼机器人应用与设计技术路线
煤矿井下作业环境存在易发生爆炸的安全隐患,因此煤矿设备下井作业的前提是需要满足《煤矿安全规程》中规定的电气设备防爆要求。在普通防爆设计下,外骨骼机器人自重会得到增加,导致外骨骼的精密性能和灵活性能降低,无法正常地辅助作业人员进行工作,甚至会加大作业人员的负重。因此首先需要解决设备防爆问题。
(1)材料选用
外骨骼机器人需要采用防爆材料制造,如铝合金、特殊合金等,在满足更高防爆性能的同时需要防止在矿井内产生火花或静电而引发爆炸;需要选用质量轻的材料,在满足防爆的前提下,减轻佩戴外骨骼工作人员的负担。对于一些特殊的、安全性要求较强的地点,如井下机房、变电所、综采工作面等,为增加外骨骼的柔顺性能,可以选用石墨、石墨烯等材料。
(2)防爆电路设计
外骨骼机器人的电路设计采用防爆技术,确保在井下使用过程中不会因电路故障引发爆炸。防爆电路的重点在于供电模块和驱动模块的防爆设计。由于功率限制,外骨骼机器人的防爆电路设计以隔爆型为主,本安型的防爆电路较难实现。具体的防爆措施,如对驱动电机增加防爆外壳,对电源接口和连接线增加隔爆密封处理或电源直接采用嵌入型接口等,如图3、图4所示。

图3 防爆伺服电机

图4 2款外骨骼机器人的电源防爆措施
(3)密封设计
外骨骼机器人不同于传统矿山装备,需要直接佩戴在人体,因此外骨骼机器人的关键部件也需要采用密封设计,使用填料密封或紧固件机械密封的方式来防止矿尘、瓦斯等有害气体侵入,同时减少爆炸的可能性。填料密封的材料可选用聚氨酯橡胶、三元乙丙橡胶、丙烯酸酯橡胶等,以适应煤矿井下温度较高的环境。针对实际环境要求,整机的防水、防尘等级应达到IPX7。
除了煤矿环境中可能引起外骨骼机器人发生爆炸的因素外,外骨骼装置自身也需要进行一些内部的结构处理,其中最主要的是防爆电池、防爆电机的选型。目前有源外骨骼的设计主要是通过电池供电,控制板控制内部电机配合进行辅助。井下外骨骼机器人要求防爆电池输出功率≥60W、输出电压≥12V、电池容量≥12000mA·h,从而保证至少8h的续航能力。而电机的最大输出转速≥1800rad/min,最大输出功率≥60W,持续转矩≥4N·m。
根据上述要求,为防止外骨骼机身过重而造成外骨骼的反作用效果。上肢外骨骼质量应≤12kg,下肢外骨骼质量应≤12kg。如需穿戴整机,整机综合质量≤20kg。实际效果中,上肢助力效果≥45%,最大搬运、拖拽质量≥80kg,下肢最大助力效果≥50%,肌肉能耗减少量≥20%。
除了整体上对外骨骼进行防爆处理以外,由于助力外骨骼搭载了较多的传感器用于感知人体运动和周围环境,传感器自身也需要进行防爆处理。下肢外骨骼主要使用的传感器分为机械式传感器和生物式传感器。机械式传感器以惯性传感器为主,包括陀螺仪、足底压力传感器、关节角度传感器等用于感知人体运动,配合编码器对人体关节进行运动解算。机械式传感器发展时间较长,应用相对成熟,但其作用时间存在一定滞后性,对于身体灵巧敏感的用户可能会直接感受到下肢外骨骼机器人的实时交互性能不佳;生物式传感器包括肌电传感器、脑电传感器、眼电传感器,分别获取肌电信号、脑电信号、眼电信号,肌电传感器、脑电传感器可以感知人体内部神经末梢释放的神经递质,这种神经递质感知通常比人体行动更早一些,故而可以用于预测人体运动意图,实体设计如图5所示。
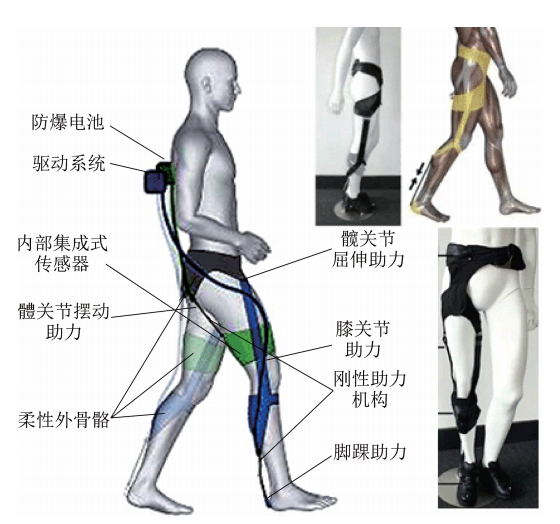
图5 煤矿助力外骨骼设计示意
高精度一体化传感系统主要指标包括:
(1)肌电信号传感器:采样频率≥500Hz,工作电压≥1.5mV,信号放大倍数≥600,信号误差≤3%,灵敏度>0.04mV。
(2)惯性测量传感器:采样频率≥120Hz,绝对误差≤3%,相对误差≤5%,灵敏度≤0.5°。
(3)压力传感器:测量范围0~0.15MPa,绝对误差≤2kPa,相对误差≤1.5%,灵敏度≤0.5kPa。
(4)系统整体:感知精度≥90%,响应时间≤450ms。
基于外骨骼自身可以半覆盖以及全覆盖人体的特点,研究人员也寄希望利用外骨骼进行人体健康安全监测,常见的安全保护技术如下。
(1)姿势监测与预警
外骨骼机器人配备有姿势传感器,可以监测矿工的姿势,并在监测到异常姿势时及时发出预警,避免矿工受伤。条件允许下,也可以配备心率监测传感器、人员定位设备等。
(2)力量限制与自适应控制
外骨骼机器人通过控制系统实时监测承载力,当承载力超出安全范围时,首先自身发出预警信号,然后发送给控制台设备预警,防止矿工过度劳累或受伤。同时外骨骼机器人设计需要一定的自适应控制,用于保护作业人员在意外摔倒、碰撞等情况时的安全。
(3)紧急停止装置
外骨骼机器人配备有紧急停止按钮或传感器,一旦发生突发状况,矿工可以通过按下按钮或触发传感器来立即停止外骨骼运动,以保障安全。传统上述传感器本身的设计和使用很少涉及防爆要求,故而仍需对上述传感器进行进一步的设计。这也是当前煤矿外骨骼机器人尚不能批量进入井下工作的原因之一。
传统的人与机械进行交互的方式主要有2种:
①由人体自身先行动,随后带动机械设备辅助运动,从而减轻人体自身运动损耗或是辅助支撑人体固定姿势;②用户先控制机械运动,而后由自己进行适量的位移。这2种人机交互方式存在性能差、灵活性差等问题。
智能化水平升级之后的下肢外骨骼人机交互不同于传统人机交互,在外骨骼机器人中加入底层控制器和多种传感器,采集人体和环境信息,识别机械用户身体状况和周边环境情况,控制设备同步辅助人体运动,这种方式使得用户感受更加流畅。中层控制器将下层控制器采集到的信息传输给上层主控,并根据上层控制器做出的决策,将运动意图映射到外骨骼设备的路径规划。上层控制器根据采集到的信息进行判识人体运动意图,类似于外骨骼的大脑做出一系列决策。
(1)底层控制器
底层控制器是构成连接人机交互的主要环节,一方面采集人体信息,另一方面受上层控制器调控,使得机器做出相应的行为。由于人机交互具有强非线性和时变性,通常随着不同的时间场合,多个部分综合反应一个行为,或是一个部分对应多个行为,并非一个信息就可以代表将要发生的动作。除了基本要求以外,需要设备自身具有强鲁棒性,即希望传感器可以进行自我矫正。当发生碰撞或用户发生下意识抖动等意外情况时,传感器可以判断出异常情况,保证信息采集相对准确。由于传感器需要提供更好的柔顺性能、鲁棒性能等要求,通常利用机器学习或深度学习,对非线性进行线性拟合。
(2)中层控制器
中层控制器主要任务是进行信息传输,分为有线和无线2种。外骨骼通常会运用有线传输,降低成本,同时外骨骼最后的生产需要进行封装处理,所以影响不大。但基于减少外骨骼的质量提高传输效率、减少整机外设复杂度等需求,无线传输主要通过蓝牙、WiFi等方式。而煤矿助力外骨骼系统由于场景环境复杂、矿山磁场影响大等因素,可能造成网络信号不佳,甚至不允许无线传输,因此主要还是通过有线传输。机械结构设计中也由最初的刚性材料逐渐替换为柔性材料或刚柔混合性材料,主要通过驱动方式、柔性化设计和材质3个方面开展柔性结构转换。近年来,也有提出刚柔混合性材料,结合使用柔性或刚性材料,如同人体肌肉与骨骼的共同作用。
(3)上层控制器
上层控制器的主要任务是判识用户的运动意图。单一信号表现的信息往往不够准确、稳定,因此需要物理信号和生物信号共同采集,上层控制算法采集到的所有信号进行信息汇总,判识出人体运动意图。运动意图可以是特定离线动作或识别关节角度的连续变化。在外骨骼前期设计中,设备一般会在实验室先进行离线动作识别,而后推广到连续关节角度的判识。将预先采集到的数据进行特征分类,在本质上是将数据整合之后再进行处理,即数据是离散的。这就导致应用具有一定的局限性,包括限制复杂运动和多样性运动、分类结果生硬、识别不了未知动作、外界环境影响等。但是人体部分行为具有相对简单的运动机理,矿用外骨骼日常涉及的行为动作种类较少。因此外骨骼的控制分类也更适合进行特征分类的状况,而基于离线分类的情况进一步实现连续动作的运动意图识别,大幅减少了局限性。
底层控制器、中层控制器、上层控制器3层系统共同组成了外骨骼的人机交互系统。煤矿井下复杂的环境要求从底层控制器到上层控制器都需要更高的精准性、稳定性。除了传统的机械设备,近年来运用可穿戴的纺织布料进行生理信号采集逐步成为主流趋势,国内外许多研究机构开始研究包括材料、制造技术、信号质量增强方法和可穿戴设备的集成。
神东煤炭集团哈拉沟煤矿、榆家梁煤矿等煤矿已经有穿戴煤矿外骨骼机器人进行试用作业案例,如图6所示。该设备自重约8kg,工人使用该设备作业时,腰肩损耗得到显著降低,搬运、高举重物时,肩肘等关节肌肉区域平均拉力最高可降低60%,肱二头肌、腰椎竖肌等肌肉的疲劳度平均降低50%,利用呼吸分析仪测得新陈代谢率降低了35%。

图6 外骨骼机器人在煤矿井上与井下的试用作业案例
能否获得安标许可是影响外骨骼机器人实际推广应用的关键因素之一,开发符合安全生产标准的外骨骼机器人防爆系统仍是实现设备下井的关键。另外,设备穿戴不便、续行不足等新问题也影响了工人的实际穿戴意愿。因此,煤矿外骨骼机器人应紧紧围绕煤矿作业人员的实际生产需求,持续改进设备性能,实现对作业人员劳动强度的有效降低,实现对煤炭工人生命健康、职业安全的进一步保障。



