









近日,研究中心负责人、中国矿业大学信息与控制工程学院党委书记程德强教授课题组在深度估计领域取得研究进展,研究成果形成论文“基于视觉注意的自监督单目深度估计”,以中国矿业大学为第一单位、程德强教授为第一作者,被EI检索的《计算机辅助设计与图形学学报》正式录用。

论文介绍

研究背景
随着计算机视觉技术的发展,单目深度估计在多个领域如机器人导航、无人驾驶、增强现实、三维重建等有着广泛的应用前景。传统的深度估计方法依赖于传感器测量成像设备,成本高昂。单目深度估计能够在不使用额外测量设备的情况下,通过给定的二维图像估计像素的深度,成为研究热点。尽管基于卷积神经网络(CNN)的方法在深度估计上取得了显著效果,但真实深度标签的采集困难且代价高,因此自监督单目深度估计方法得到了广泛关注。
研究内容
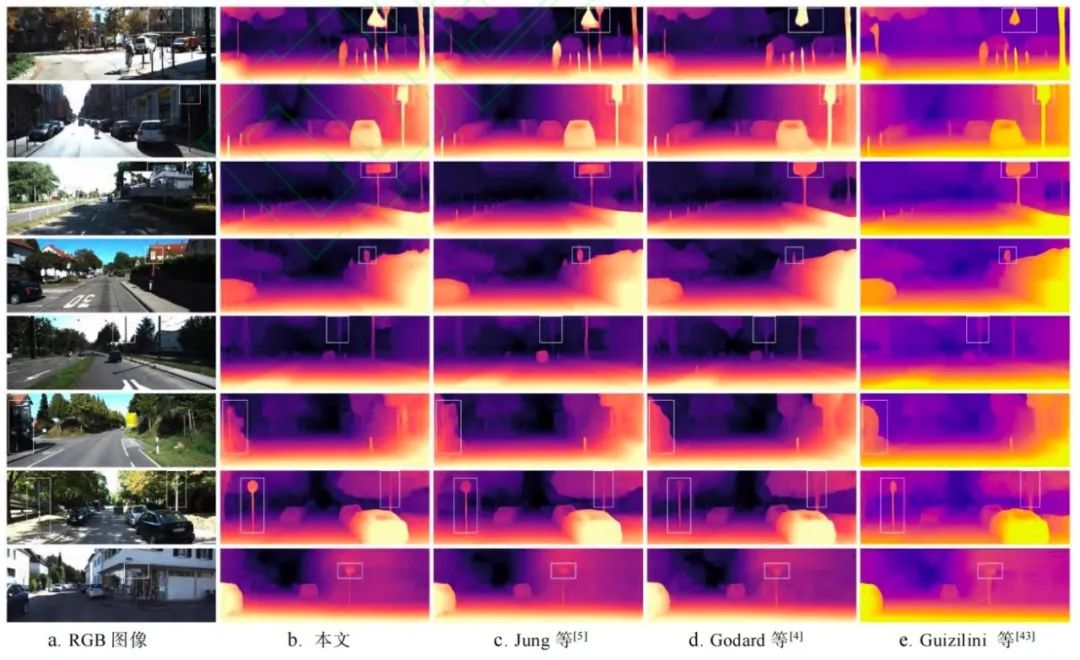
本文提出了一种基于视觉注意的自监督单目深度估计方法,旨在解决现有方法在复杂纹理区域预测效果差的问题。研究者首先构建了多尺度源图像输入编码器,以更好地融合多路特征;其次,通过并行的中间注意力模块跨区域交互,在空间维度和通道维度建模语义依赖关系,获取丰富的上下文信息;此外,采用连续的外部注意力特征聚合模块构成解码器部分,有效利用上下文信息解决复杂区域的不适应问题。实验结果表明,该方法在KITTI和Cityscapes数据集上优于当前主流方法,在复杂纹理区域拥有更好的深度预测性能。
应用场景
该研究的预期用途是在无需昂贵传感器设备的情况下,通过单目图像进行深度估计,为无人驾驶、机器人导航、增强现实、三维重建等领域提供技术支持。具体应用包括自动驾驶汽车的环境感知、虚拟现实中的场景理解、移动设备的空间交互等。此外,由于该方法在复杂纹理区域表现出色,它也适用于城市街景、自然景观等复杂场景的深度映射和分析。

整体网络框架

在KITTI 数据集上可视化结果
在Cityscapes 数据集上可视化结果


论文引用格式

[1]程德强,徐帅,韩成功,等.基于视觉注意的自监督单目深度估计[J/OL].计算机辅助设计与图形学学报:1-12[2024-04-03].
http://kns.cnki.net/kcms/detail/11.2925.TP.20240119.1504.003.html.
论文下载链接
https://kns.cnki.net/kcms2/article/abstract?v=Dl4MPbsAiWeqyUJVz9M5HptoCDIO5phA5cFbWCfvacy0_2H1bt2yQp2HBcWgXwDksdb4IAPDu5V06k0Wnb4yxYje94jVCXb1SSKIjWbgxtVUFXetxK1ES8GDtiBR1sYu8HFlW-U2_-Y=&uniplatform=NZKPT&language=CHS
本研究中心以卓越的科研实力和创新精神,不断推动着智能技术在检测与模式识别领域的发展。研究中心荣幸宣布已发表多项论文,这些论文是我们在科研创新中的重要成果。这些论文不仅展现了我们团队在智能技术领域的深入研究,也为产业应用和社会发展提供了有力的理论支撑。论文的发表不仅认可了我们的研究成果,更激励我们持续探索、创新,为智能检测与模式识别领域的进步贡献更多智慧和力量!
研究中心简介
中国矿业大学智能检测与模式识别研究中心充分发挥人才、软件等优势,立志于用图像处理AI算法取代传统煤矿人为监管,实现全程智能化运行多维度、多角度的视识别、分析及统计,及时发现隐患,保障煤矿安全生产制度落实,进一步提升煤矿安全生产水平,降低煤矿安全事故,为安全生产提供决策支撑。研究中心成立以来,发明了30多种面向矿并特殊作业环境的全矿井视频分析算法,研制了系列云-边-端协同分析的智能分析摄像仪,拥有多种针对煤矿场景下的图像处理相关的高质量论文、核心专利技术以及软件著作权等独立知识产权。研究中心秉持专注人-机-环的作业安全和竭诚服务矿山本质安全的宗旨,主要面向有人员违章环境参数异常、设备工作状态的监管需求的煤矿非煤矿企业,提供安全生产场景的视频分析技术和边缘AI智能装备,践行服务煤矿安全生产的使命担当!

