



在矿山领域,一场由机器人引领的革命正在悄然发生。近日,国家矿山安全监察局与工业和信息化部联合公布了《矿山领域机器人典型应用场景名单》,共有31个典型应用场景和66个场景实例脱颖而出,成为矿山安全高质量发展的新引擎。
这些典型应用场景涵盖了掘进、巷道支护、采煤、无人驾驶、钻孔钻进、管路安装、喷浆作业、电力辅助作业、铲装、运矿、选矸、矿石分选、异物分拣、碎矿磨矿、自动加药、穿爆、非爆开采、指挥调度、皮带机巡检、井筒巡检、巷道巡检、变电所巡检、水泵房巡检和设备巡检等多个方面,几乎覆盖了矿山生产的每一个环节。
从煤矿掘进自主作业到露天矿山无人驾驶,从智能钻探到井下喷浆作业,这些典型应用场景不仅展示了矿山领域机器人的广泛应用和创新能力,更体现了国家对于矿山安全生产的高度重视和支持。
本期,IntelMining摘选并展示【喷浆场景】,包括:
矿用高效智能混凝土喷浆
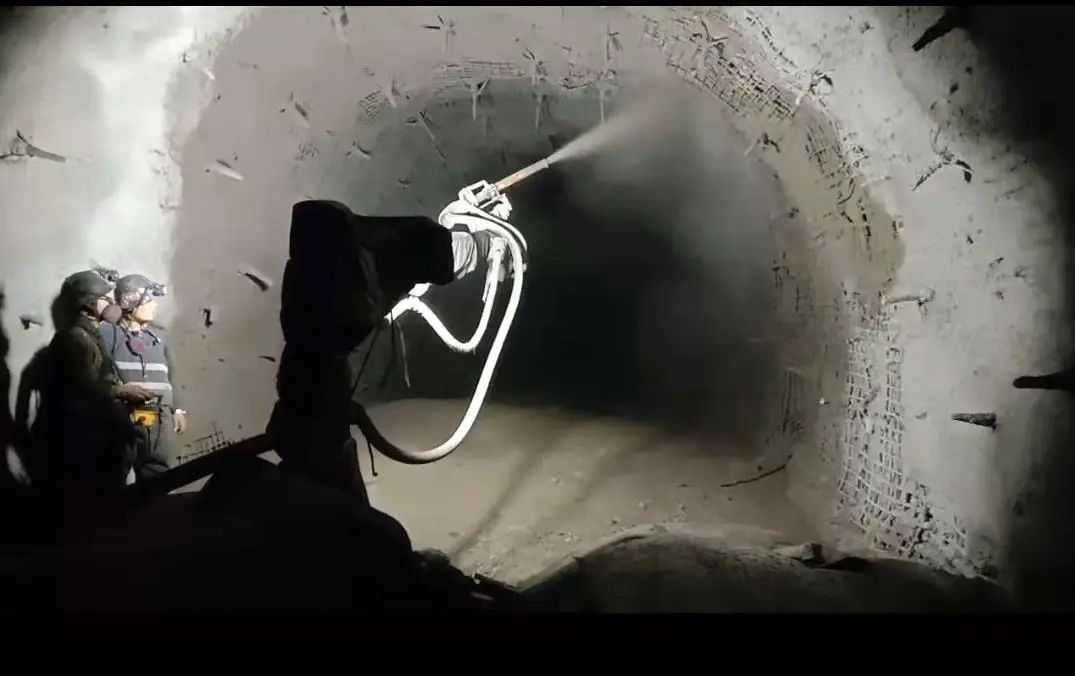
井下喷浆作业
矿用智能湿式混凝土喷浆
煤矿井下智能湿式喷浆
(以下内容由企业公开信息整理而成,具体以申报资料为准)
附件
制造及应用单位:
山东金科星机电股份有限公司、安徽理工大学
案例介绍:
高效智能混凝土喷浆机器人,集行走、扫描、配料、搅拌、泵送、机械手喷浆为一体,实现自动配料、上料搅拌、扫描定位、路径规划、智能喷射、自动修正、数据交互等功能,以提高混凝土喷射质量和效率,确保喷浆工作面安全。
采用全液压泵送结构设计,通过对泵送混凝土流变特性及泵送压力分析、液压系统动态特性仿真分析等,实现连续上料搅拌、泵送、喷射。采用控制系统模块化设计,实现车载、行进、远程遥控等工作状态下的自主行走、障碍规避与功能。通过三维环境重构、巷道特征识别、喷射模型分析等,实现喷射路径的自动规划和喷射作业。采用机械手终端轨迹规划与精确控制技术,实现喷枪的最佳喷射方位喷浆,喷浆层厚度均匀,回弹率低。通过有线/无线混合网络实现遥控遥测数据、视频信息的传输、喷浆装备操作指令的下达、监控信息的显示等功能。
矿用混凝土湿式喷浆系统
矿用混凝土辅助喷射车与混凝土湿喷机配套使用完成矿山、隧道、地铁、水利水电工程巷道内混凝土的喷射施工,它具有整机小巧、灵活、耐用、爬坡能力强、远距离遥控、六自由度无死角喷射等特点,代替人工实现湿喷机械化作业,彻底解决人工喷射劳动强度大的问题。
功能特点:
采用了全液压泵送结构设计,可实现连续上料搅拌、泵送及喷射混凝土,喷浆机械手全遥控操作,大大提高了工作效率。
控制系统采用模块化设计,具备自动定位、路径规划、智能喷射、自动修正、数据交互等功能。
在提高混凝土喷射质量及施工效率的同时,可有效确保喷浆工作面的本质安全。
出料均匀,回弹率低。高频稀薄流输送使得混凝土在输料管内几乎无脉冲现象,混凝土出料均匀,回弹率低,喷浆质量好。
运行安全,移动方便。采用全液压驱动,行走方式有矿车轮、履带、滑橇等多种配置,运行方便。
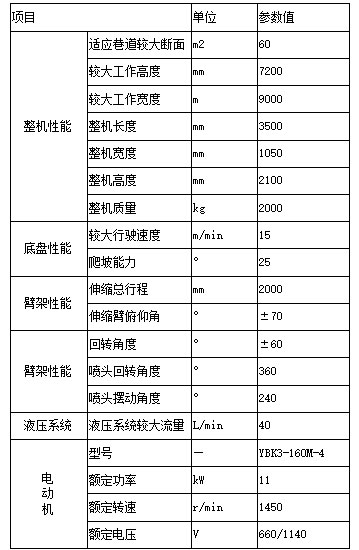
CPF-45LY矿用混凝土辅助喷射车

功能特点:
劳动强度低:设备操作只需一人,并且可以实现遥控,大大降低了职工劳动强度。
喷射范围广:喷头可实现 360°旋转,180°摆动;伸缩臂行程 2100mm,俯仰 -60°/+70°。
操作灵活:采用负载敏感系统控制设计,动作平稳,操作灵活,能耗低。机械化作业,喷射连续均匀,有利于降低回弹率。
适应性强:较大工作宽度约 8.8m、较大工作高度约 6.9m,适用于 15 ~ 60m2 巷道断面。履带爬坡能力 20° ,行走速度约 25m/min。
技术参数:
制造及应用单位:
山东天河科技股份有限公司、陕西煤业物资有限责任公司
案列介绍:
智能化喷浆系统深度结合成熟的人工喷浆工艺,采用三维激光扫描仪进行作业对象的自动定位、自动扫描、自动提取、自动识别,利用先进的串联多关节臂架控制策略和轨迹规划算法,自动驱动臂架按照工艺流程进行自主喷浆而无需人工干预,同时该系统兼容现有的手动操作模式。
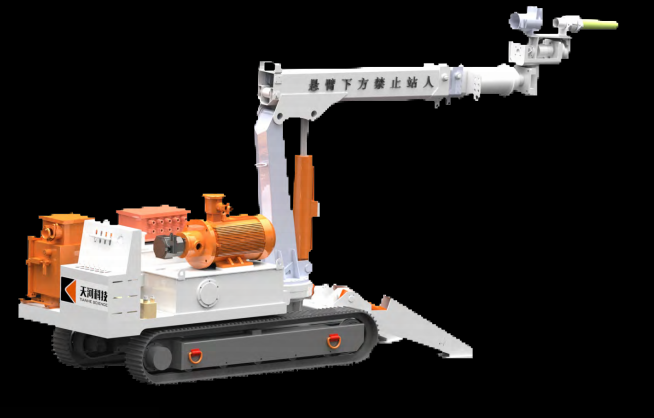

喷浆机器人
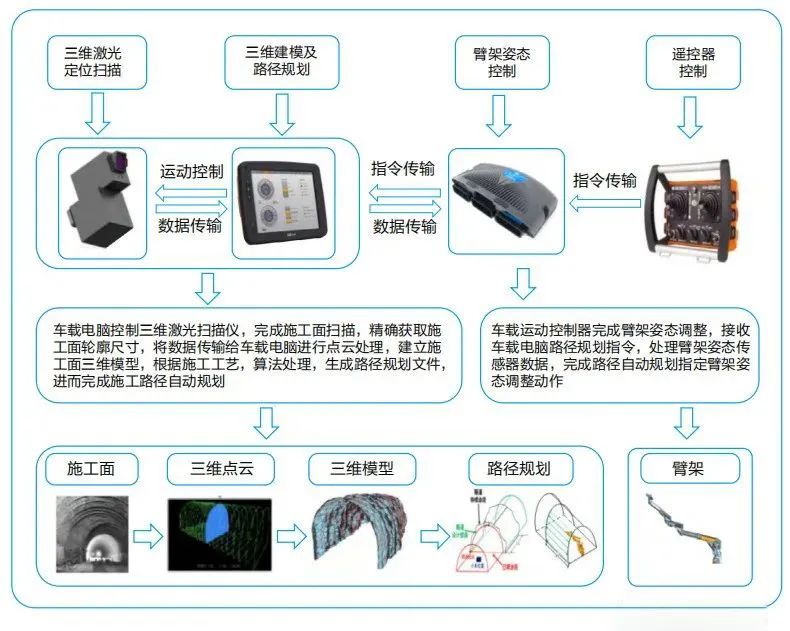
系统总成技术路线
技术特点:
1. 台车定位,确定喷浆机与巷道待喷面之间的位置关系;
2. 三维激光扫描,生成作业对象三维模型;
3. 点云识别,提取钢拱架位置、间距,已喷面与未喷面过渡段;
4. 超欠挖分析,与巷道设计文件对比,生成超欠挖数据、方量统计;
5. 喷涂运动控制,根据路径轨迹规划文件,控制臂架自动运动;
6. 全程三维可视化显示;
7. 喷射质量检验、回弹率统计、平整度检测等。
技术参数:

案例应用
陕煤彬长矿业大佛寺矿针对井下巷道喷浆施工产尘量大、设备工具更换频繁、劳动强度大、作业效率低等实际问题,积极引进PYC6ZL转子式混凝土喷浆“机器人”,全面开启巷道喷浆远距离无尘化高效作业新模式。

该喷浆“机器人”主要由混凝土喷射机、集尘器和辅助喷射车等组成,采用全液压驱动,配备履带式车体行走机构和自动上料装置,可在施工区域自行移动。作业过程中,辅助喷射车臂架和喷头可实现多角度自由旋转,集尘器可对拌料、上料过程中产生的粉尘进行集中处理,较传统工艺相比,具有喷射距离远、粉尘低、无脉冲、喷浆量可调、回弹料小等优点。
目前,该喷浆“机器人”已在井下正式投用,日均可喷浆成巷10m,大幅提高工时效率、降低了职工劳动强度、改善了作业环境。
在陕煤彬长矿业小庄矿,PYC6ZL转子式混凝土喷浆“机器人”可实现远距离供料喷浆作业,极大地提升喷浆效率,降低职工劳动强度。

该喷浆“机器人”由混凝土喷射机和辅助喷射车组成,设备自身均自带液压式履带可短距离自行移动,两者间采用专用管路连接,喷射距离最远水平距离可达300米,极大地减少了喷浆过程中移机频率。
该设备采用全内置锥形转子式给料及密封结构,解决了运行时的扬尘问题,极大地降低了扬尘量。其气料腔内采用多料杯叶片轮结构,使得物料实现稀薄流均匀输送,有效减少了堵管现象,降低了浆料反弹率。作业过程中,辅助喷射车臂架和喷头可实现多角度自由旋转,提高了喷浆作业质量。
新式喷浆机的投运,将改善以往井下喷浆喷射距离短、喷浆机移动频繁、劳动强度大及产尘量大等缺点,实现远距离供料喷浆作业,降低职工劳动强度。
制造及应用单位:
陕西小保当矿业有限公司、渭南陕煤启辰科技有限公司
案例介绍:
2022年,渭南陕煤启辰科技有限公司自主设计生产的矿用喷浆机器人成套装备先后通过安标国家矿用产品标志中心技术检验、型式检验、工厂评审,顺利取得4件安标证书。

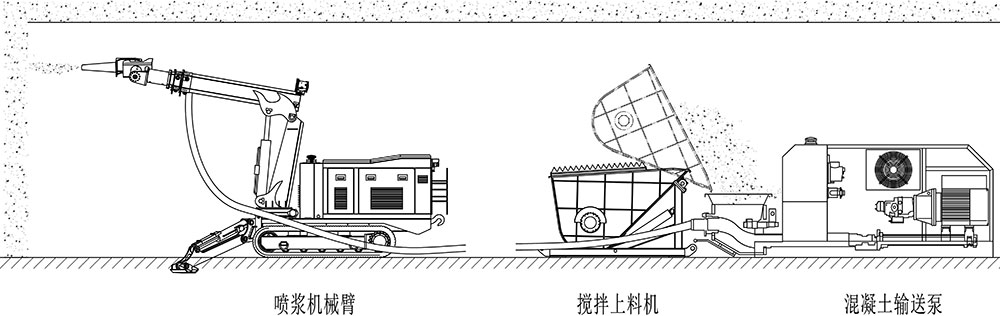
矿用混凝土辅助喷射车(喷浆机械臂)

湿式混凝土喷射机

矿用湿式混凝土输送泵

矿用混凝土搅拌车
案例应用
陕煤小保当公司一号煤矿2-2煤东翼回风大巷设计宽度6米,高度4.52米,长度达到5764米,巷道喷浆工程量大,传统喷浆多靠人工手动作业,机械化程度低、劳动强度大、混凝土回弹率高。同时,由于喷浆材料运输繁琐,喷浆距离不长,在作业时,需要不断推进喷浆机的所在位置,不仅大大增加了施工成本,也使得工作效率更加具有局限性。

该矿成立喷浆设备改造攻关小组,根据井下现场实际工况,经过认真研究讨论、反复模拟验证、不断推敲升级,最终设计研发出“远距离智能喷浆机器人”,该设备主要由矿用混凝土辅助喷射车、混凝土搅拌机以及本安型混凝土输送泵三部分组成,已在正式投入使用,且性能稳定,运行良好,达到了预期的效果。
为了让智能喷浆机器人在井下现场更加灵活方便,攻关小组通过一遍遍优化,巧妙地给其装配了履带式行走机构。在井下喷浆作业期间,工人只需通过遥控器远程操作,便可实现整体设备在作业区域内的自由移动,代替人工完成煤矿井下巷道喷浆过程中上料、搅拌、远距离泵送及喷浆的全自动和流程化的作业,将喷浆施工人员从恶劣的环境中解放出来,保证了操作人员的健康和安全。
远距离智能喷浆机器人投入使用后,井下喷浆作业由6人缩减至2人,而且日喷浆进度由原来的40米提升至70米左右,混凝土回弹率由20%降至8%,一年可节约人工成本约120万元,既减小了企业运营成本,又最大程度提高了施工效率,进一步确保了矿井巷道喷浆作业的“安全、高效、绿色”发展。
该矿用混凝土喷浆机器人成套技术及装备,能够实现煤矿井下巷道喷浆过程的自动上料、搅拌、远距离泵送及喷射等施工工艺,具有远距离遥控作业、可视化显示工作参数、无线视频监控、工作运行平稳、粉尘浓度低、喷射距离远、生产效率高、安全可靠等产品性能优势,成套装备中多项技术在国内属首创,并完成了多项与产品相关的专利申报工作。
制造及应用单位:
中煤陕西榆林能源化工有限公司、中煤电气有限公司
案例介绍:
智能喷浆系统可实现混凝土自动化上料、搅拌、湿喷和智能喷浆,整体过程可实现无人或者少人化,适用于煤矿井下大巷掘进期间的喷浆工作。

智能喷浆机器人主体设计为台车的形式,将喷浆机械臂与混凝土湿喷机集成 一体,主要由车体、混凝土湿喷和喷浆机械手及其控制系统组成,同时采用柴油 机和电机双驱动力,两者互不影响。智能喷浆机器人集成三维激光雷达,可实现 巷道断面的三维扫描与建模,通过对巷道模型的坐标优化进行机械臂路径规划, 实现机械臂的自动化喷浆过程;湿喷机采用三缸式设计,可实现混凝土的稳定供 料。

智能喷浆机器人以三维激光雷达实现对巷道空间的自动扫描与建模,并进行 空间坐标的智能优化,以此基础指导系统进行喷头运动规划路径。
6自由度机械臂采用创新的回转驱动形式,适应煤矿巷道的“之”字形喷浆模式,采用动态倾角传感器实现位姿检测与控制,达到了喷浆位置与姿态的闭环控制。 利用惯性导航数据和激光扫描获得的末端喷头位姿反馈,对各区域喷浆厚度、顺序及路径进行规划,浆料输送距离达到273米,喷射回弹率为10.68%。
湿喷机基于混凝土泵送过程的“削峰填谷”原理进行设计,通过加入辅助混凝土缸实现了混凝土泵送过程的脉冲补偿,从而实现混凝土的稳定供料和连续喷浆, 减小机械臂振动和消除喷射盲区,保证受喷面的平整性。
该设备采用柴油机和电机双驱形式,可满足有电和无电多种场所的应用,服 务于矿山巷道的喷射支护建设过程。
智能喷浆机器人应用项目在井下巷道工作面的应用,实现了真正的湿式喷浆 作业和喷浆的人机协同作业,在喷浆设备研制、湿喷工艺研究与试验、现场人员 智能化操作等方面取得了一些成绩。提高了掘进面装备水平,减少现场人员,降 低劳动强度,降低粉尘浓度改善环境。

