-
全部



主办单位:煤炭科学研究总院有限公司、中国煤炭学会学术期刊工作委员会
Research on load-sensitive feed speed regulating hydraulic system of drilling robot
王宾昌魏伟肖玉清张溟晨
WANG Binchang;WEI Wei;XIAO Yuqing;ZHANG Mingchen
中煤陕西榆林能源化工有限公司煤矿灾害防控全国重点实验室中煤科工集团重庆研究院有限公司
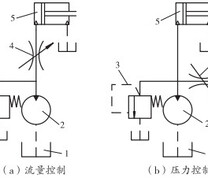
针对传统钻机给进调速液压系统无法满足钻孔机器人节能及准确给进调节需求的问题,分析了现有典型给进调速系统的特点,设计了用于钻孔机器人的负载敏感给进调速系统,构建了“泵—阀—负载—泵”的流量调节闭环。建立了负载敏感给进调速液压系统仿真模型,进行了斜坡负载、交变负载和恒负载—斜坡控制信号3种典型工况下的仿真,仿真过程中油缸运动速度稳定,系统具有较好的负载特性。与传统给进调速系统开展对比试验,结果表明,负载敏感给进调速液压系统在传动效率和控制精度方面都具有明显优势。研究结果有助于解决钻孔机器人给进液压传动效率和控制精度问题,可为钻孔机器人其他系统的优化提供借鉴。
Aiming at the problem that the traditional hydraulic system of drilling feed speed regulation cannot meet the needs of energy saving and accurate feed regulation of drilling robot, the characteristics of existing typical feed speed regulating system were analyzed. A load-sensitive feed speed regulating system for drilling robot was designed, and a flow regulating closed loop of "pump-valve-load-pump" was constructed. The simulation model of load-sensitive feed speed regulating hydraulic system was established, and the simulation of the slope load, the alternating load and the constant load-slope control signal were carried out. In the simulation process, the motion speed of the cylinder was stable and the system had good load characteristics. Compared with the traditional feed speed regulating system, the results show that the load-sensitive feed speed regulating system has obvious advantages in transmission efficiency and control accuracy. The research results are helpful to solve the problems of hydraulic transmission efficiency and control accuracy of drilling robot, and can provide reference for the optimization of other drilling robot hydraulic systems.
钻孔机器人负载敏感液压系统给进调速系统流量调节负载特性
drilling robot;load-sensitive hydraulic system;feed speed regulating system;flow regulation;load characteristic
图(7) / 表(2)


主办单位:煤炭科学研究总院有限公司 中国煤炭学会学术期刊工作委员会
 矿业安全与环保
矿业安全与环保  2024年第06期
2024年第06期