-
全部



主办单位:煤炭科学研究总院有限公司、中国煤炭学会学术期刊工作委员会
Optimization of shotcrete manipulator motion trajectory based on AIWCPSO algorithm
石灿檀子良雷超李允旺徐寒飞胡乔炜计振东
SHI Can;TAN Ziliang;LEI Chao;LI Yunwang;XU Hanfei;HU Qiaowei;JI Zhendong
中国矿业大学(北京)机械与电气工程学院煤矿智能化与机器人创新应用应急管理部重点实验室中国安全生产科学研究院矿山安全技术研究所
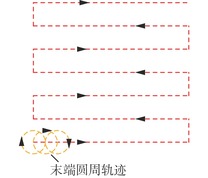
针对传统喷浆机械臂轨迹规划算法存在多路径段间过渡突变、频繁启停导致喷浆效率不高和喷浆不均匀等问题,提出了一种自适应惯性权重及加速度系数的粒子群优化(AIWCPSO)算法,并基于该算法实现喷浆机械臂运动轨迹优化。提出了改进多段轨迹规划算法,采用直线加圆弧轨迹的过渡策略,将竖直方向的直线运动替换成圆弧运动,通过正弦加减速启停算法规划机械臂末端启停处的轨迹,以防止加速度突变,中间段的直线和圆弧轨迹进行匀速轨迹规划,实现机械臂末端匀速光滑运动;通过AIWCPSO算法在运动学约束下对运动参数进行优化,得到最优喷浆时间和速度,提升喷浆机械臂工作效率和喷浆均匀度。实验结果表明:与传统喷浆轨迹规划算法相比,改进多段轨迹规划算法喷浆平均效率提高了25.42%,喷浆轨迹均匀度明显改善;采用AIWCPSO算法优化后,喷浆效率提高了1.330 8%。
To address issues in traditional shotcrete manipulator trajectory planning algorithms, such as abrupt transitions between multiple path segments and low shotcrete efficiency and uniformity caused by frequent starts and stops, an optimized motion trajectory method based on the adaptive inertia weight and acceleration coefficient particle swarm optimization (AIWCPSO) algorithm was proposed. An improved multi-segment trajectory planning algorithm was developed, which incorporated a transition strategy combining linear and arc trajectories. Vertical linear motion was replaced with arc motion. Additionally, a sinusoidal acceleration and deceleration start-stop algorithm was used to plan the trajectory of the end effector of the manipulator at start and stop points to prevent abrupt changes in acceleration. The middle segment of linear and arc trajectories was planned for uniform motion, ensuring smooth and uniform movement at the end effector of the manipulator. Using the AIWCPSO algorithm, motion parameters were optimized under kinematic constraints to achieve the optimal shotcrete time and speed, thereby improving the efficiency and uniformity of the shotcrete manipulator. Experimental results showed that, compared with traditional trajectory planning algorithms, the improved multi-segment trajectory planning algorithm increased average shotcrete efficiency by 25.42% and significantly improved the uniformity of shotcrete trajectory. After optimization with the AIWCPSO algorithm, shotcrete efficiency increased by 1.330 8%.
巷道支护喷浆机械臂多段轨迹规划算法正弦加减速启停算法自适应惯性权重及加速度系数的粒子群优化算法运动参数优化
roadway support;shotcrete manipulator;multi-segment trajectory planning algorithm;sinusoidal acceleration and deceleration start-stop algorithm;AIWCPSO algorithm;motion parameter optimization
图(19) / 表(4)


主办单位:煤炭科学研究总院有限公司 中国煤炭学会学术期刊工作委员会
 工矿自动化
工矿自动化  2024年第12期
2024年第12期 












