



煤矿巷道掘进具有工程量大、安全事故发生频率高、岗位人员多等特点。近年来,随着我国煤矿机械化、智能化、无人化的逐渐发展,采煤工作面推进速度和产量的不断提高,采掘接续紧张的局面日益突出,这对巷道掘进关键技术与装备的快速发展提出了保障安全、减少人员及提高效率的更高要求。然而,我国掘进工作面智能化发展尚处于初级阶段,国家和行业尚未发布统一的建设标准,且诸多关键技术还需深入研究。为响应国家智能装备产业发展战略、契合煤炭行业无人化掘进发展趋势,亟需煤炭企业与科研院所合作开展深入的、适用性高的智能化掘进关键技术研究与应用。
基于此,中煤陕西榆林能源化工有限公司大海则煤矿(简称大海则煤矿)联合中煤(天津)地下工程智能研究院有限公司经过基础理论研究、工艺设计创新、关键技术攻关、软件系统开发等阶段,将人工智能、工业物联网、大数据、云计算等新一代信息技术与掘进工艺进行深度融合。以实现夹矸与片帮并存复杂地质条件下智能化掘进为目标,基于现役的Sandvik掘锚一体机、锚运破一体机等掘进装备,突破了深埋大断面厚顶煤巷道掘进技术瓶颈;攻克了掘锚机长距离精确定位技术、多机协同控制技术、数字孪生远程集中监控等多项关键技术;开发了基于GIS+BIM和数字孪生技术的掘锚工作面集控平台,实现了“人-机-环-管”全参数、多系统数据融合联动及集控一体化;初步实现了生产过程的少人干预和少人值守,减人增安提效效果显著。
文章来源:《智能矿山》2023年第11期“智能示范矿井”专栏
第一作者:智宝岩,高级工程师,国家能源局第一批煤矿智能化专家,现任中煤陕西榆林能源化工有限公司总工程师,主要从事煤矿设计和煤矿智能化管理工作
通讯作者:潘格格,工程师,现任中煤(天津)地下工程智能研究院有限公司智能矿山研究所研发室室主任,主要从事煤矿掘进智能化工作
作者单位:中煤陕西能源化工集团有限公司;中煤(天津)地下工程智能研究院有限公司
引用格式:智宝岩,潘格格,胡成军.大海则煤矿深埋片帮条件下煤巷智能快速掘进探索与实践[J].智能矿山,2023,4(11):18-27.
关注微信公众号,了解更多矿山智能化建设进展
根据大海则煤矿已施工建成的巷道实际揭露巷道地质条件可知:煤层赋存稳定,整体较平缓;三维地震勘探未发现规模较大的断层或褶皱;无岩浆活动及其他地质不良构造体,但局部地段煤层起伏发育;矿井为低瓦斯矿井,属二氧化碳-氮气带;煤层属于Ⅰ类容易自燃煤层;施工过程中,可揭露隐伏的小断层,煤体呈竖向裂隙发育(图1);煤壁帮部较为破碎,出现片帮严重的问题,该问题为制约掘进效率的主要因素。
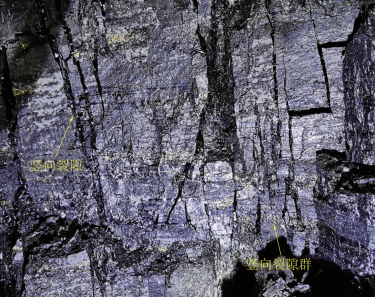
图1 煤体竖向裂隙发育情况
为突破深埋大断面厚顶煤巷道掘支技术瓶颈,实现安全高效快速掘支。笔者深入分析了深埋厚顶煤巷道维护效果及存在问题,研究了深埋高应力巷道的围岩应力分布特征,揭示了巷道掘进工作面截割扰动应力的波动形态及截割扰动的速度效应,提出了基于厚锚固圈层柔性群锚及高效掘支协同技术的控制对策与技术体系。
与浅埋巷道相比,深埋巷道掘进过程中,围岩发生由浅及深的渐进式损伤破坏,高应力向围岩深部转移,围岩浅部出现低值应力区,即损伤破坏区。由于顶煤强度较低,顶板损伤破坏范围超过锚杆锚固区范围,致使锚杆整体处于损伤破坏范围内,锚杆承载效能较低。同时,顶板应力不连续传递导致煤帮应力集中、损伤破坏范围进一步加大。巷道围岩整体锚杆(索)支护密度为15.5根/m,其中顶板支护密度为6.4根/m,导致掘进工作面支护量大、掘进循环中支护环节耗时长。受支护速度影响,巷道掘进速度难以大幅度提升,由此造成岩体损伤破坏范围进一步加大。
研究发现巷道围岩应力分布特征及掘进工作面循环截割扰动的速度效应,5种不同掘进速度下卸载扰动应力变化规律如图2所示,随着掘进速度的增大,掘进工作面截割对后方顶板岩层的扰动强度降低。当掘进速度较慢时,单循环扰动期长、应力施载充分,顶板岩层损伤大;而掘进速度较快时,单循环扰动期短、应力施载不充分,顶板岩层损伤小。
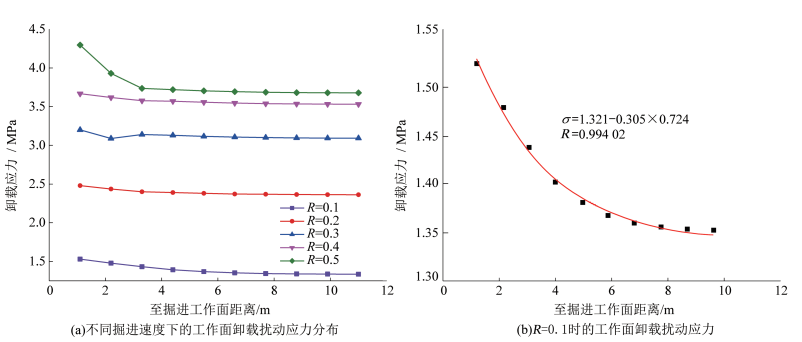
图2 不同掘进速度下巷道掘进工作面的卸载扰动应力分布规律
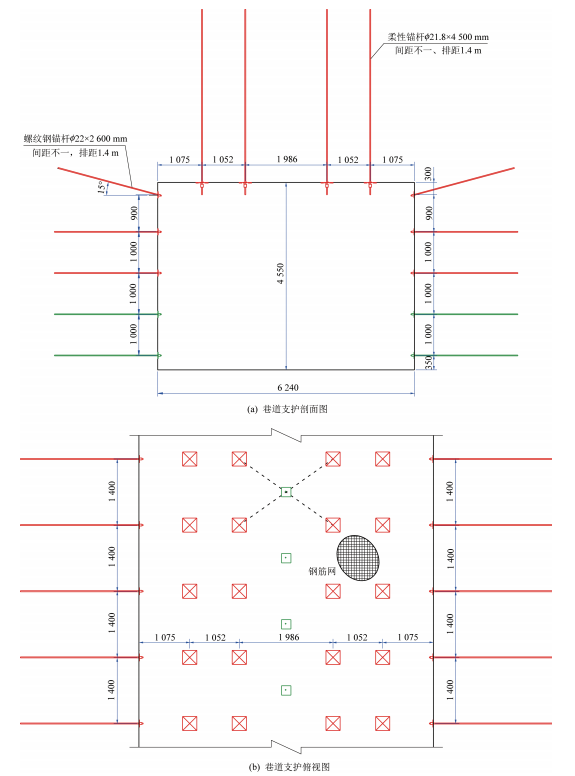
基于以上分析,笔者提出以顶板临界锚固层厚度为核心的柔性群锚支护方法,通过提高单根锚杆支护效能以降低整体支护密度,加大顶板锚杆锚固层厚度使之穿过顶板浅部裂隙损伤圈层至深部稳定性较好的岩层中,消除锚固端部以外的离层裂隙,促使顶板应力连续向下传递,避免由于顶板应力向两侧转移从而发生顶板浅部岩体拉伸破裂、煤帮应力集中等现象。因此,笔者设计了新型低密度高效能支护方案(图3),支护排距增加了36.4%,支护密度降低了35.7%,有效控制了巷道围岩稳定性,大幅提高了巷道掘进速度,实现了高效掘支协同。
为提高掘进效率,降低作业人员劳动强度,大海则煤矿基于现役配套设备,增配迈步式自移机尾,智能化掘进工作面采用横轴式掘锚一体机+锚运破一体机+带式转载机+迈步式自移机尾+可伸缩带式输送机+集控中心的配套方式(图4)。
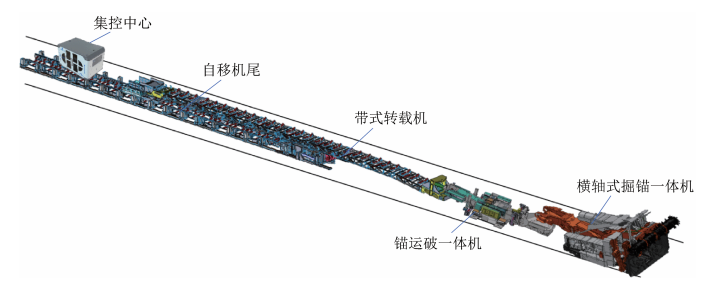
图4 智能化掘进工作面配套方式
针对惯性导航累积误差大、全站仪棱镜易被遮挡等单一定位方式存在的问题,结合横轴式掘锚一体机工艺特点,笔者提出了基于多激光线特征识别的组合式长距离定位方法,构建了惯性导航+全站仪+多激光线的掘锚一体机长距离精确定位系统(图5)。该定位系统利用数字全站仪采集棱镜的位置信息,获取机身实时位置信息并发送至光纤惯导中,对惯导的累计误差进行校正,再根据位姿解算模型实现掘锚一体机的位姿参数求解,并与多激光线特征识别方法检测到的掘锚一体机位姿信息进行融合,输出最终掘锚一体机位置和姿态信息。实际应用中(图6),该系统能够稳定输出位姿信息,三方向位移误差在30mm以内,姿态角误差在±0.03°以内。
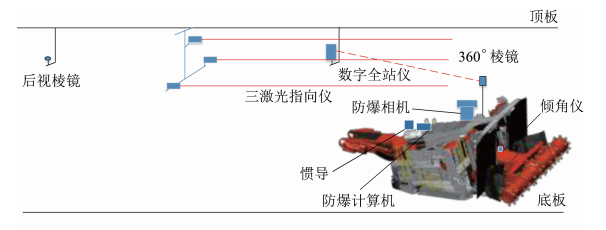
图5 掘锚一体机长距离精确定位系统总体方案
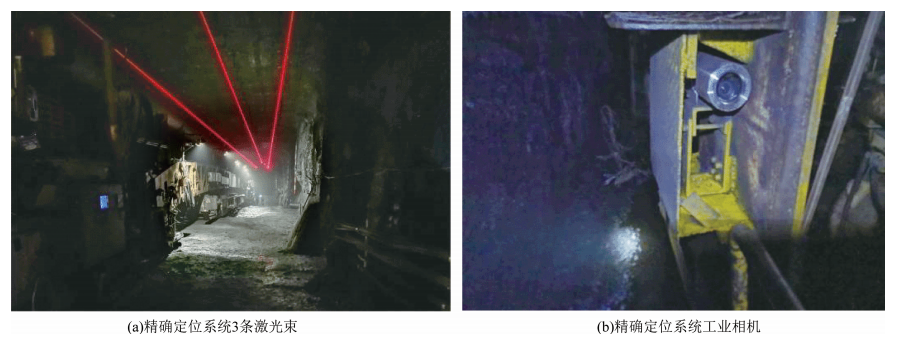
图6 长距离精确定位系统现场应用
为解决Sandvik掘锚一体机通信协议不对外开放、不具备双向通信能力的问题,在未改造电控系统情况下,通过E-BOX数据传输模块,实时监测电机的电流、关键零部件的温度及液压油温等工况参数(图7)。
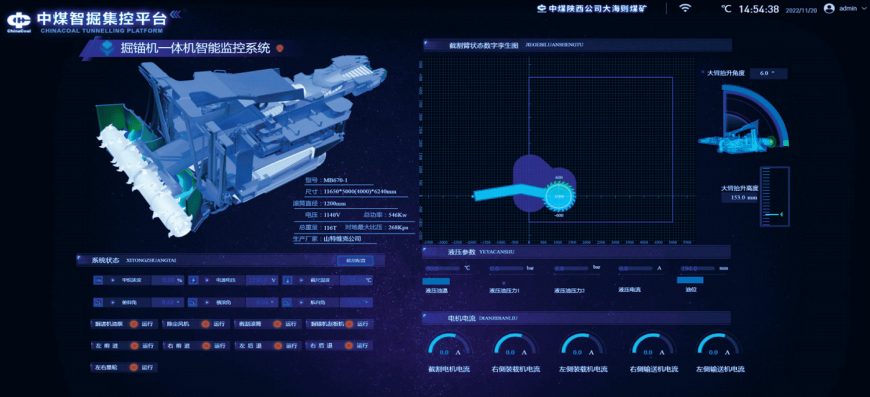
图7 掘锚一体机远程监控系统界面
结合掘锚一体机定位数据信息,计算得出截割滚筒相对于巷道断面的位置信息,开发了自适应截割控制系统,利用掏槽油缸、截割升降油缸的精确比例和位置控制,实现了全断面自动截割。
对现有锚运破一体机进行电液控改造升级,在保留原有手动操作功能、不改变原机操作习惯的前提下,通过增加切换开关实现了本地和远程遥控模式切换;通过矿用无线接收器,实现了近地遥控和远程监控功能,基于工作面有线和5G网络进行设备工况信息传输和远程操控(图8)。
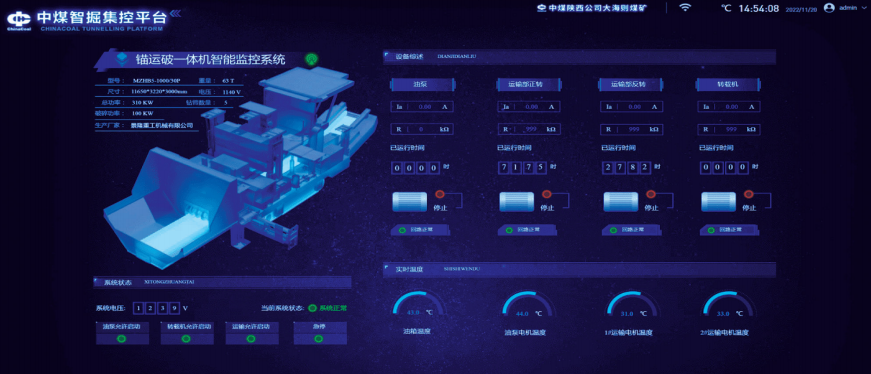
图8 锚运破一体机远程监控系统
人员接近预警系统基于UWB检测技术,实现对设备周围的人员精确定位。预警系统可分析并确定越界探测系统的越界报警范围,将工作面分为安全区域、报警区域和危险区域,对进入危险区域内的人员进行身份识别和危险状态判断(图9)。预警系统可在设备运动状态下实时对工作人员所在区域的设备进行闭锁,防止掘锚一体机、锚运破一体机误动作对人员造成伤害。
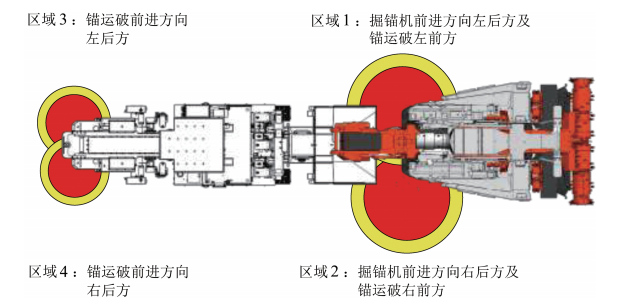
图9 人员接近预警系统报警区域划分
基于雷达检测技术研发的设备防碰撞系统可采集掘锚一体机与锚运破一体机之间以及设备与巷道之间的距离,当距离小于安全值时,及时发出预警信号,杜绝发生物理碰撞,设备防碰撞系统工作原理如图10所示。
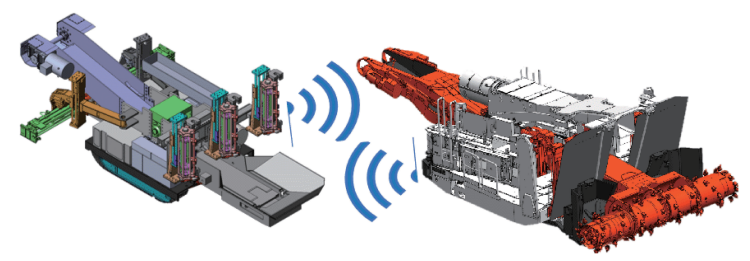
图10 设备防碰撞系统工作原理
基于智能视频识别技术开发了视频安全分析管理系统(图11),实现了对转载堆煤、输送带状态、人员违规进入危险区域、环境等风险监测报警与联动控制,解决了现有视频人工监视系统存在盲点多、只监不控、缺乏报警和联动的问题。智能视频安全分析管理系统同时融合了人员接近预警系统、智能视频识别技术及环境监测等。此外,还建立了智能预警模型,构建了多方位人员安全保障技术体系。

图11 智能视频安全分析管理系统界面
笔者通过研究巷道围岩潜在冒落区的形成机理,探究潜在冒落区的三维形态,掌握了切削块体形成的力学机制,确定了煤巷顶板钻进信息特征参量及识别潜在冒落区特征指标,研发了钻进信号采集仪与智能决策系统,实现了自主分析钻进参数和风险区域支护设计。智能决策系统开发思路如图12所示。在大海则煤矿进行了潜在冒落区识别的现场工程试验,钻进过程遇到顶板劣化区时,系统信号出现了明显的变化,使用钻孔窥视仪进行现场观测,结果表明:基于随钻振动信号识别顶板潜在冒落区与钻孔观测结果基本一致,可以达到裂化区域边界识别的要求。钻孔工作是巷道支护过程中必不可少的关键环节,采用根据锚杆钻机钻进信息反演顶板状态的随钻地质测量系统,实现了钻进过程中自动识别潜在冒落区的三维形态,一方面实时智能评估原始支护适应性,优化变更支护参数,消除了冒顶隐患;另一方面,可以准确获得岩层结构和厚度变化,细化和修正工作面地质模型,提高了工作面地质保障透明度。
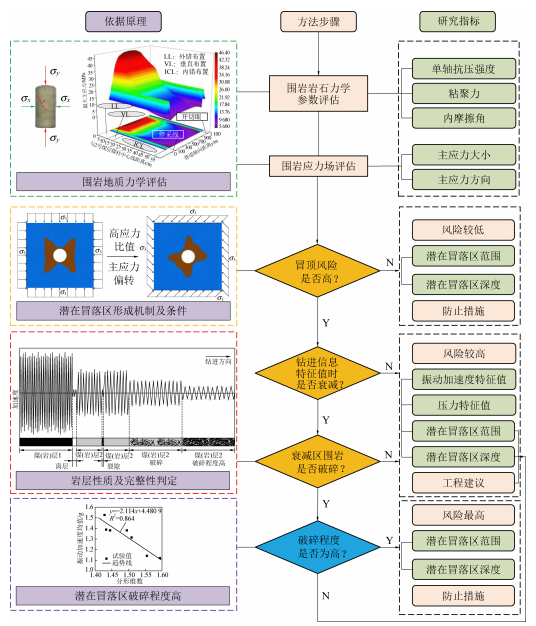
图12 智能决策系统开发思路
依托大海则煤矿5G全覆盖网络,以有线传输和5G的方式并行传输、互为备用为核心理念,通过在设备终端布置5G模组,搭建基于5G与工控网的掘进面多源异构数据采集、传输、分析与决策平台(图13),实现了超低延时数据传输,网络延时小于30ms,提高了数据交互效率。
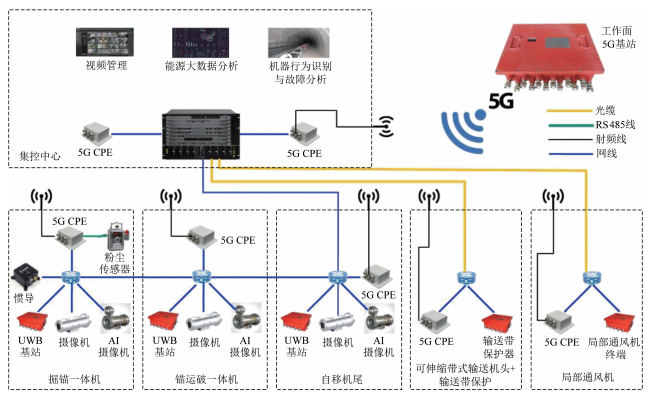
图13 单机5G网络通信系统拓扑
以工作面掘进、支护、运输及辅助工艺为基础,研究快速掘锚成套装备自动协同控制逻辑,分析掘锚机、锚杆转载机、带式转载机、可伸缩带式输送机及除尘风机等多个设备之间协调联动控制关系,实现了成套智能装备的连续掘进和设备之间的联动、闭锁、行走、牵引、姿态等协调控制。连续运输系统协同控制逻辑如图14所示。
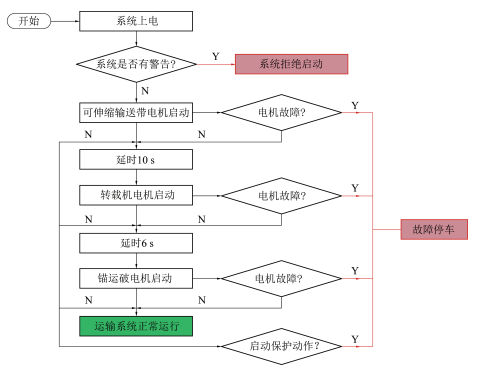
图14 连续运输系统协同控制逻辑
基于GIS+BIM及数字孪生技术,开发了基于多机协同控制技术的掘进工作面集控平台(图15),构建巷道地质及设备三维模型,实现了掘进工作面真实场景再现。集控平台可通过感知层采集到的设备运行工况和故障诊断信息、人员信息及环境监测信息等,经多源异构数据融合平台进行数据处理后,发送至决策应用层,从而实现“人-机-环-管”全参数、多系统数据融合联动和集中一体化管控。大海则煤矿地面生产控制指挥中心掘进操作台如图16所示。
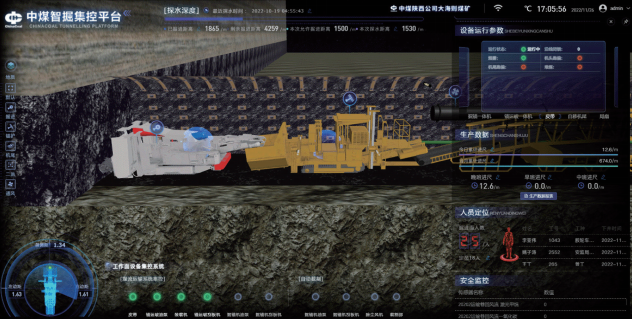
图15 大海则煤矿远程集控平台界面

图16 大海则煤矿地面生产控制指挥中心掘进操作台
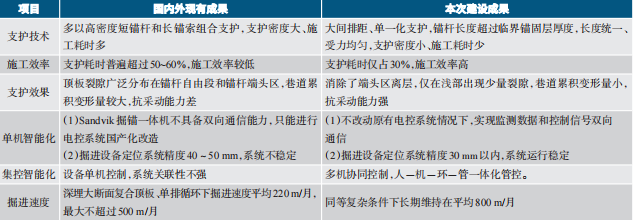
针对大断面巷道、多装备施工的工程装备特点,建立了具有中煤特色的智能化掘进工作面,在支护工艺升级、设备工艺配套优化、单机智能化提升及多机协同作业多重作用下,日进尺最高达到了42m,月进尺提高了33%,单班作业人员减少2名,减人增安提效效果显著。与国内外同类技术比较,本次掘进工作面智能化建设在支护技术、施工效率、支护效果、单机智能化、集控智能化和掘进速度6个方面均取得显著效果,建设成果与国内外同类技术成果的综合比较见表1。
表1 建设成果与国内外同类技术成果的综合比较
助理编辑 | 江振鹏
编辑丨李雅楠
审核丨武英刚

