



近日,国家矿山安全监察局山西局联合山西省应急管理厅、山西省能源局共同推进了一项重要举措——在全省煤矿井下危险作业区域安设“电子围栏”(《关于推进全省煤矿井下危险作业区域安设“电子围栏”的通知》矿安晋﹝2024﹞56号),以科技手段筑牢矿工生命安全防线。
最近,大同煤矿集团轩岗煤电有限责任公司麻家梁煤矿发生的掘进机作业人员拉拽胶管时被截割头割伤致死以及山西忻州神达集团万鑫安平煤业有限公司作业人员被掘进机截割头绞伤致死的机电事故,又为煤矿安全生产敲响了警钟!为了深刻汲取该类事故教训,强化井下危险作业区域管理,山西局等部门决定引进“电子围栏”技术,应用于掘进工作面、煤仓、密闭墙、带式输送机等井下关键危险区域的安全预警。
“电子围栏”又称人员接近防护系统,是一种先进的安全防护系统。当现场人员接近预设的预警区域时,系统会自动触发声光报警提示;一旦人员进入危险区域,系统不仅会发出报警提示,还会立即触发相关设备停机,从而有效避免事故的发生。
据了解,该系统的应用范围广泛,包括采煤工作面刮板输送机机头、转载机过桥、破碎机入料口等区域。在掘进工作面,无论是掘进装备、锚护装备还是辅助作业装备,只要有人员进入预警区域,系统都会迅速作出反应,确保人员的安全。
此外,针对溜煤眼或煤仓上、下口等特殊部位,以及密闭墙外部等隐患区域,也安装了相应的“电子围栏”。这些措施的实施,将大大提高矿井的本质安全水平,为矿工们创造一个更加安全的工作环境。
当然,该技术的推广实施并非一蹴而就。山西局等部门制定了详细的推进计划,并设定了明确的时间节点。他们将与各煤矿企业紧密合作,确保“电子围栏”技术在全省范围内的顺利部署和应用。
“电子围栏”技术的应用是煤矿安全领域的一次重大突破,将为矿工们提供更加可靠的安全保障。同时,这也标志着煤矿安全管理正朝着智能化、科技化的方向发展。
随着“电子围栏”技术的广泛应用,我们期待煤矿安全事故能够得到有效遏制,矿工们的生命安全得到更好的保障。同时,我们也期待更多科技手段能够应用于煤矿安全领域,为矿工们创造更加安全、高效的工作环境。
 电子围栏安装示意及说明(参考)
电子围栏安装示意及说明(参考)
一、掘进工作面掘进装备(综掘机、掘锚机、掘锚一体机、连采机等)
1.1综掘机
1.1.1安装方式
综掘机的人员接近防护系统安装位置示意图如图1所示。在综掘机的司机驾驶室的另一侧安装红外热成像仪,红外热成像仪分别向前和向后采集司机驾驶盲区范围的行车环境图像信息。显示器在司机驾驶室或其他司机视野范围内,确保司机能清晰看见监控画面。UWB(超宽带)读卡器安装在综掘机的设备中心位置,声光报警器安装在车体上显眼位置。
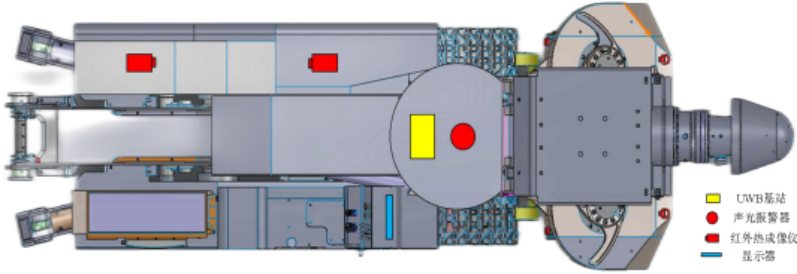
图1综掘机人员接近防护系统安装示意图
1.1.2工作要求
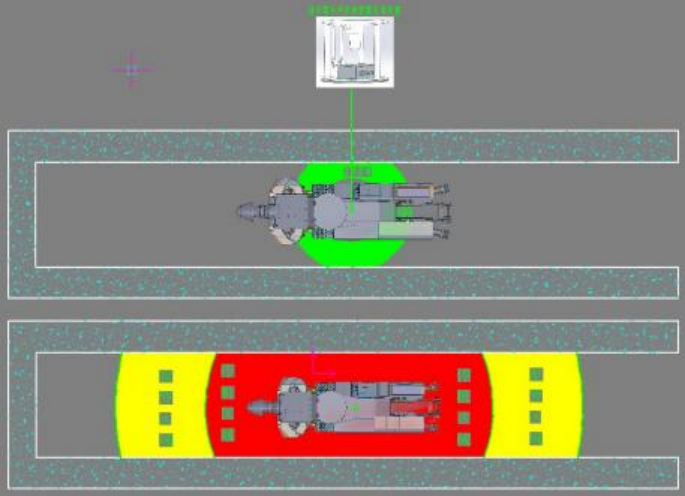
图2综掘机人员接近防护系统报警、停机区、工作区
图2中黄色区域为报警区、红色区域为停机区、绿色区域为工作人员工作区。外来人员进入报警区,系统自动触发综掘机报警提示;外来人员进入停机区,系统自动触发综掘机报警提示并停机。本机工作人员离开工作区时,系统自动触发综掘机报警提示并停机。建议距离综掘机的机头或机尾7m的范围(以读卡器距离设备机头或机尾较长侧距离为准)划定为报警区;距离综掘机的机头或机尾3m的范围(以读卡器距离设备机头或机尾较长侧距离为准)划定为停机区;以读卡器为圆心,4m为半径的区域划定工作区。
针对综掘机单岗作业特性,在工作区域内,有且只有1名工作人员的情况下设备能够正常启机运行。
在红外热成像仪的监测区域内,根据现场的作业需求划定危险区域和停机区域两级电子围栏,当人员闯入综掘机的危险区域时,系统发出报警提醒;当人员闯入停机区域时,发出报警提示并立即触发综掘机停机。
1.2掘锚机、掘锚一体机
1.2.1安装方式
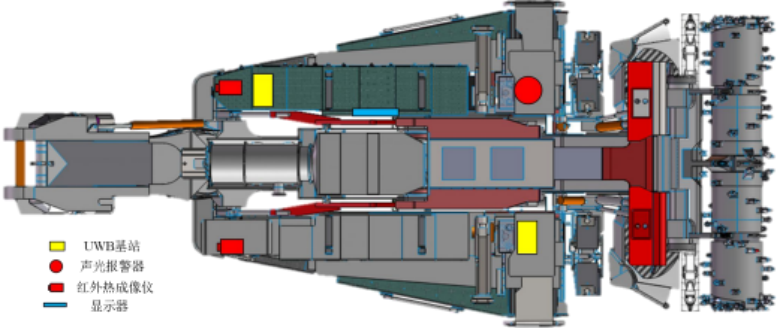
图3掘锚机人员接近防护系统安装示意图
掘锚机的人员接近防护系统安装位置示意图如图3所示。在掘锚机的机尾两侧的安装基于热成像的人员安全防护系统,红外热成像仪采集机尾两侧的行车环境图像信息。显示器在司机操作位置,声光报警器倒挂在操作室顶板下方,确保司机能清晰看见监控画面与报警指示灯。UWB读卡器安装在掘锚机的尾部两侧。所有设备具有相应的防护罩保护措施。
1.2.2工作要求
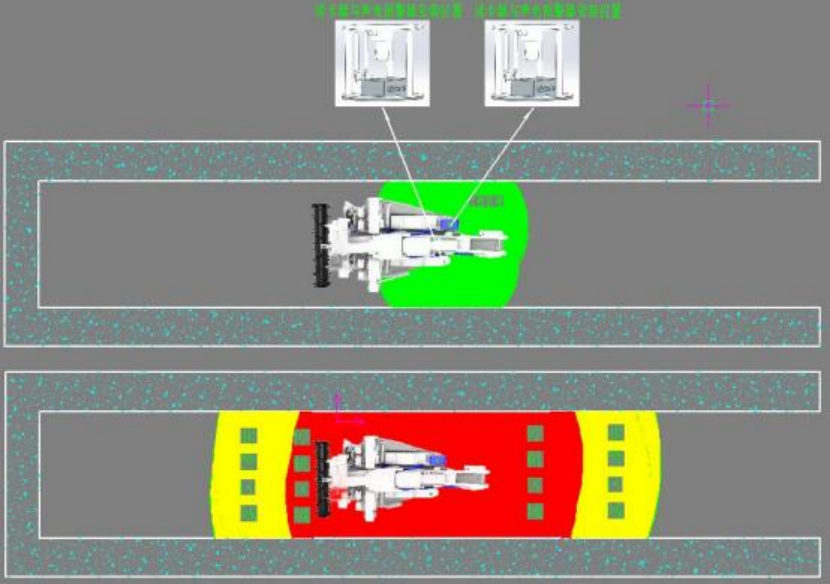
图4掘锚机人员接近防护系统报警、停机区、工作区
图4中黄色区域为报警区、红色区域为停机区、绿色区域为工作人员工作区。外来人员进入报警区,系统自动触发掘锚机报警提示;外来人员进入停机区,系统自动触发掘锚机报警提示并停机。本机工作人员离开工作区时,系统自动触发掘锚机报警提示并停机。建议距离掘锚机的机头或机尾7m的范围(以读卡器距离设备机头或机尾较长侧距离为准)划定为报警区;距离掘锚机的机头或机尾3m的范围(以读卡器距离设备机头或机尾较长侧距离为准)划定为停机区;以读卡器为圆心,4m为半径的区域划定工作区。
掘锚机区分行走和支护模式:
在支护模式下,人员接近防护系统只报警不停机,同时掘锚机机尾锁定,禁止左右上下摆动。
在行走模式下,人员接近防护系统正常投用,当人员进入报警区域后,锁定掘锚机行走,当人员进入停机区域后,掘锚机停机。
在红外热成像仪的监测区域内,根据现场的作业需求划定危险区域和停机区域两级电子围栏,当人员闯入掘锚机的危险区域时,系统发出报警提醒;当人员闯入掘锚机的停机区域时,发出报警提示并立即触发掘锚机停机。
1.3连采机
1.3.1安装方式
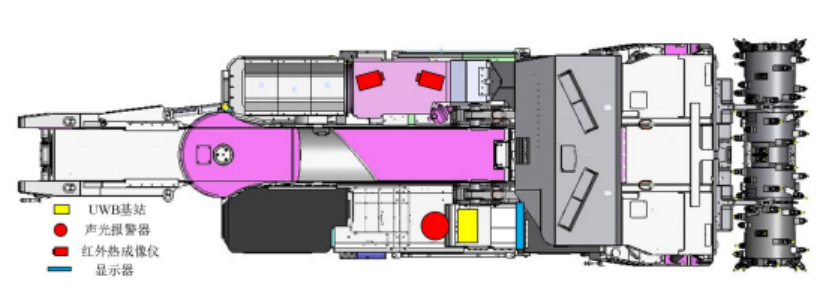
图5连采机人员接近防护系统安装示意图
连采机的人员接近防护系统安装位置示意图如图5所示。在连采机的驾驶室的另一侧安装基于热成像的人员安全防护系统,热成像仪分别向前和向后采集司机驾驶盲区范围的行车环境图像信息。显示器安装在驾驶室内,确保司机能清晰看见监控画面。声光报警器、UWB读卡器安装在连采机驾驶室正上方,并有相应的防护罩保护措施。
1.3.2工作要求
图6中黄色区域为报警区、红色区域为停机区、绿色区域为工作人员工作区。外来人员进入报警区,系统自动触发连采机报警提示;外来人员进入停机区,系统自动触发连采机报警提示并停机。本机工作人员离开工作区时,系统自动触发连采机报警提示并停机。建议距离连采机的机头或机尾7m的范围(以读卡器距离设备机头或机尾较长侧距离为准)划定为报警区;距离连采机的机头或机尾3m的范围(以读卡器距离设备机头或机尾较长侧距离为准)划定为停机区;以读卡器为圆心,2m-4m的环形区域划定工作区。
针对连采机单岗作业特性,在工作区域内,有且只有1名工作人员的情况下设备能够正常启机运行。
在红外热成像仪的监测区域内,根据现场的作业需求划定危险区域和停机区域两级电子围栏,当人员闯入连采机的危险区域时,系统发出报警提醒;当人员闯入连采机的停机区域时,发出报警提示并立即触发连采机停机。
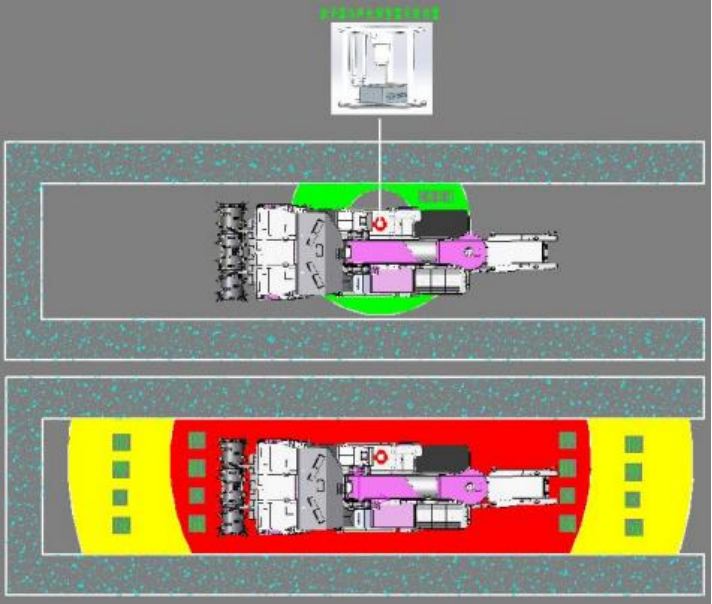
图6连采机人员接近防护系统报警区、停机区、工作区
二、掘进工作面锚护装备(两臂锚杆机、四臂锚杆机、运锚机等)
2.1两臂锚杆机
2.1.1安装方式
两臂锚杆机的人员接近防护系统安装位置示意图如图7所示。在两臂锚杆机驾驶室的后方和两臂锚杆机的前端安装基于热成像的人员安全防护系统的热成像仪。热成像仪分别向前和向后采集司机驾驶盲区范围的行车环境图像信息。显示器安装在驾驶室内,确保司机能清晰看见监控画面。声光报警器、UWB读卡器安装在两臂锚杆机驾驶室左侧,并有相应的防护罩保护措施。
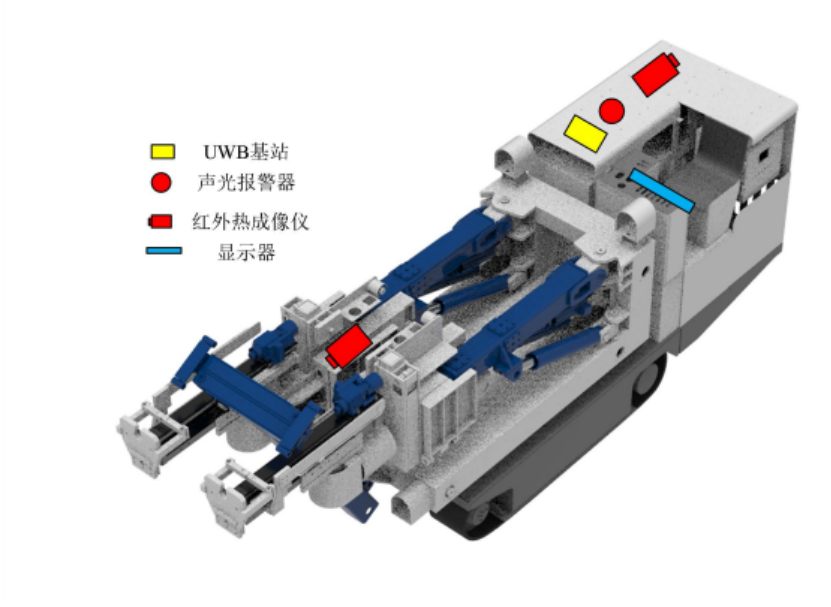
图7两臂锚杆机安装位置示意图
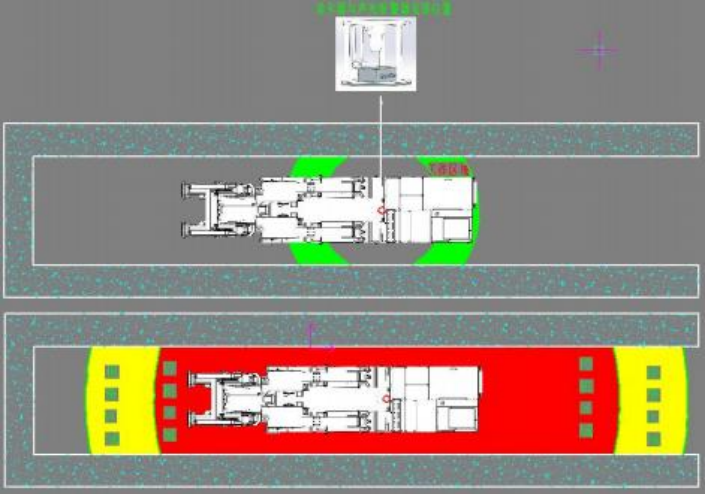
图8两臂锚杆机人员接近防护系统报警区、停机区、工作区
2.1.2工作要求
图中黄色区域为报警区、红色区域为停机区、绿色区域为工作人员工作区。
两臂锚杆机在打锚杆作业时,外来人员进入报警区或停机区,系统只触发两臂锚杆机报警提示,不停机。
两臂锚杆机在行走时,外来人员进入报警区,系统自动触发两臂锚杆机报警提示;外来人员进入停机区,系统自动触发两臂锚杆机报警提示并停机。本机工作人员离开工作区时,系统自动触发两臂锚杆机报警提示并停机。设备区分支护和行走模式,在行走模式下,人员靠近预警区域,设备预警,人员靠近停机区域后,设备停机。在支护模式下,人员闯入防护系统的报警区和停机区设备只预警不停机。
建议距离两臂锚杆机的机头或机尾7m的范围(以读卡器距离设备机头或机尾较长侧距离为准)划定为报警区,距离两臂锚杆机的机头或机尾3m的范围(以读卡器距离设备机头或机尾较长侧距离为准)划定为停机区,以读卡器为圆心,2m-4m为半径的环形区域划定工作区。
在红外热成像仪的监测区域内,根据现场的作业需求划定危险区域和停机区域两级电子围栏,当人员闯入两臂锚杆机的危险区域时,系统只发出报警提醒;当人员闯入两臂锚杆机的停机区域时,发出报警提示并立即触发两臂锚杆机停机。
2.2四臂锚杆机
2.2.1安装方式
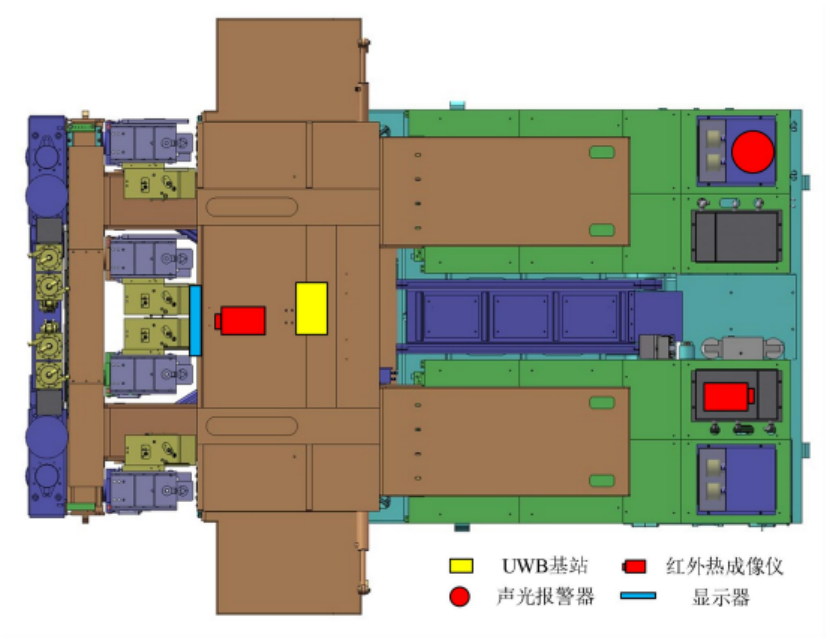
图9四臂锚杆机安装位置示意图
四臂锚杆机的人员接近防护系统安装位置示意图如图9所示。在四臂锚杆机的顶棚和尾部安装红外热成像仪,分别向前和向后采集司机驾驶盲区范围的行车环境图像信息。显示器安装在四臂锚杆机的操作台前方,确保司机能清晰看见监控画面。声光报警器、UWB读卡器安装在两臂锚杆机的尾部左右两侧,并有相应的防护罩保护措施。
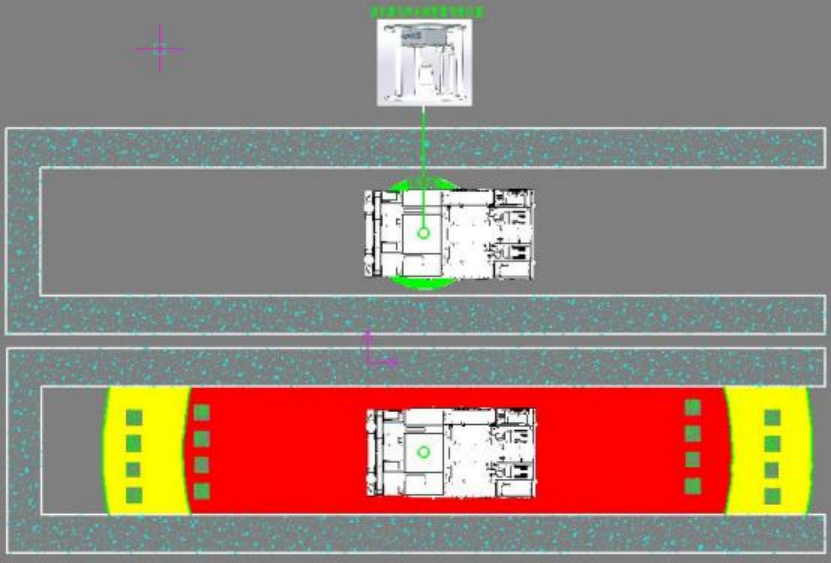
图10四臂锚杆机人员接近防护系统报警区、停机区、工作区
2.2.2工作要求
图中黄色区域为报警区、红色区域为停机区、绿色区域为工作人员工作区。
四臂锚杆机在打锚杆作业时,外来人员进入报警区或停机区,系统只触发四臂锚杆机报警提示,不停机。
四臂锚杆机在行进时,外来人员进入报警区,系统自动触发四臂锚杆机报警提示;外来人员进入停机区,系统自动触发四臂锚杆机报警提示并停机。本机工作人员离开工作区时,系统自动触发四臂锚杆机报警提示并停机。建议距离四臂锚杆机的机头或机尾7m的范围(以读卡器距离设备机头或机尾较长侧距离为准)划定为报警区,距离四臂锚杆机的机头或机尾3m的范围(以读卡器距离设备机头或机尾较长侧距离为准)划定为停机区,以读卡器为圆心,2m为半径的圆形区域划定工作区。
区分支护和行走模式,在行走模式下,人员靠近预警区域,设备预警,人员靠近停机区域后,设备停机。在支护模式下,人员闯入防护系统的报警区和停机区设备只报警不停机。
在红外热成像仪的监测区域内,根据现场的作业需求划定危险区域和停机区域两级电子围栏,当人员闯入四臂锚杆机的危险区域时,系统只发出报警提醒;当人员闯入四臂锚杆机的停机区域时,发出报警提示并立即触发四臂锚杆机停机。
2.3六臂运锚机
2.3.1安装方式
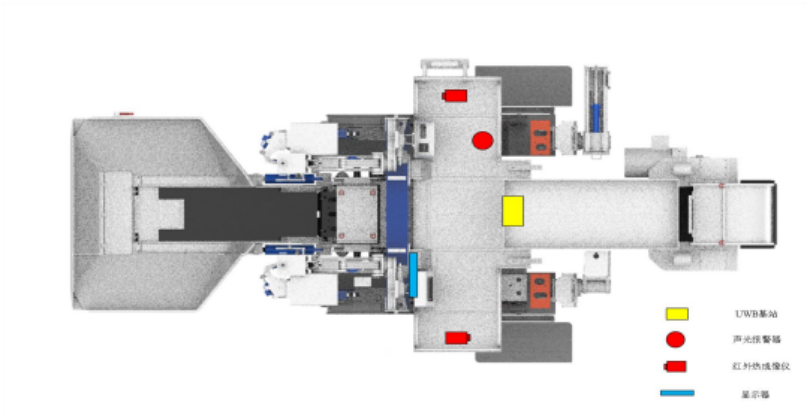
图11安装位置示意图
六臂运锚机的人员接近防护系统安装位置示意图如图11所示。在六臂运锚机的两侧安装人员安全防护系统的红外热成像仪,分别向前和向后采集司机驾驶盲区范围的行车环境图像信息。显示器安装在六臂运锚机的操作台前方,确保司机能清晰看见监控画面。声光报警器、UWB读卡器也安装在六臂运锚机的左右两侧,并有相应的防护罩保护措施。

图12六臂运锚机人员接近防护系统报警区、停机区、工作区
2.3.2工作要求
图12中黄色区域为报警区、红色区域为停机区、绿色区域为工作人员工作区。
外来人员进入报警区,系统自动触发六臂运锚机报警提示;外来人员进入停机区,系统自动触发六臂运锚机报警提示并停机。本机工作人员离开工作区时,系统自动触发六臂运锚机报警提示并停机。
建议距离六臂运锚机的机头或机尾7m的范围(以读卡器距离设备机头或机尾较长侧距离为准)划定为报警区,距离六臂运锚机的机头或机尾3m的范围(以读卡器距离设备机头或机尾较长侧距离为准)划定为停机区,以读卡器为圆心,3m为半径的圆形区域划定工作区。
在红外热成像仪的监测区域内,根据现场的作业需求划定危险区域和停机区域两级电子围栏,当人员闯入六臂运锚机的危险区域时,系统只发出报警提醒;当人员闯入六臂运锚机的停机区域时,发出报警提示并立即触发六臂运锚机停机。
三、掘进工作面辅助作业装备(梭车、铲运车、装载机、耙装机等)
3.1梭车
3.1.1安装方式
梭车的人员接近防护系统安装位置示意图如图13所示。在梭车的司机驾驶室的另一侧安装红外热成像仪,分别向前和向后采集司机驾驶盲区范围的行车环境图像信息。显示器安装在梭车的驾驶室,确保司机能清晰看见监控画面。声光报警器、UWB读卡器安装在梭车的驾驶室顶棚,并有相应的防护罩保护措施。
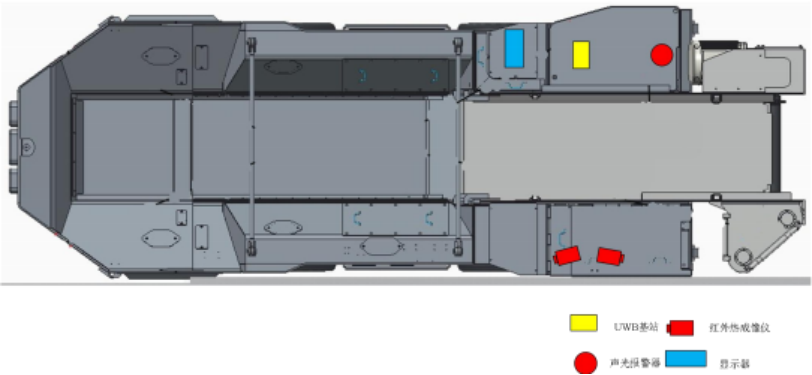
图13安装位置示意图
3.1.2工作要求
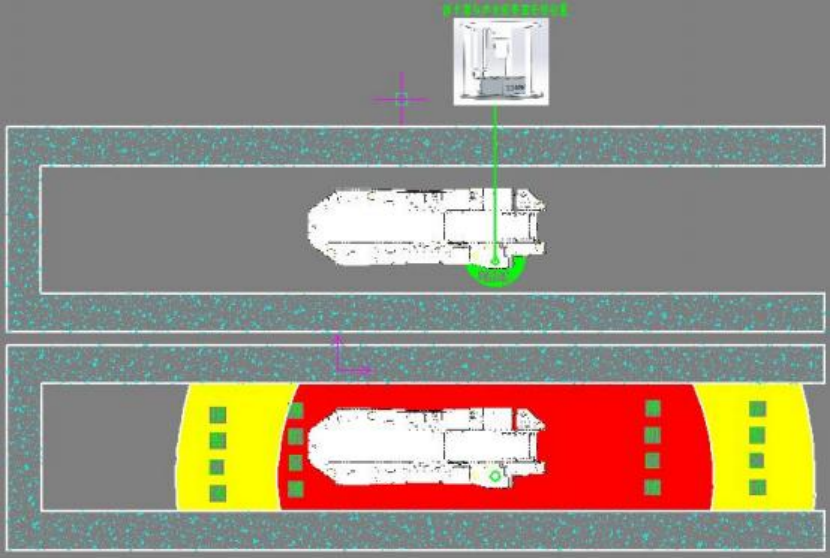
图14梭车的人员接近防护系统报警区、停机区、工作区
图14中黄色区域为报警区、红色区域为停机区、绿色区域为工作人员工作区。非本机的作业人员进入报警区,系统自动触发声光报警器的报警提示:进入停机区,系统自动触发梭车的报警提示并停机。本机工作人员离开工作区时,系统瞬间自动触发梭车的停机并报警提示,防止人员在行车过程中靠近梭车。当司机离开驾驶室时,系统能够自动出发梭车停机并发出报警提示。
建议距离梭车的车头或车尾9m的范围(以读卡器距离设备车头或车尾较长侧距离为准)划定为报警区,距离梭车的车头或车尾5m的范围(以读卡器距离设备车头或车尾较长侧距离为准)划定为停机区,以读卡器为圆心,4m为半径的圆形区域划定工作区。针对梭车单岗作业特性,在工作区域内,有且只有1名工作人员的情况下设备能够正常启机运行。
在红外摄像仪的监测区域内,根据现场的作业需求划定危险区域和停机区域两级电子围栏,当人员闯入梭车的危险区域时,系统发出报警提醒;当人员闯入梭车的停机区域时,发出报警提示并立即触发梭车停机。
3.2铲运车
3.2.1安装方式
铲运车的人员接近防护系统安装位置示意图如图15所示。在铲运车的司机驾驶室的另一侧安装基于热成像人员安全防护系统的热成像仪,两路热成像仪分别向前和向后采集司机驾驶盲区范围的行车环境图像信息。显示器在司机驾驶室或其他司机视野范围内,确保司机能清晰看见监控画面。UWB读卡器安装在铲运车的设备中心位置,声光报警器安装在车体上显眼位置。
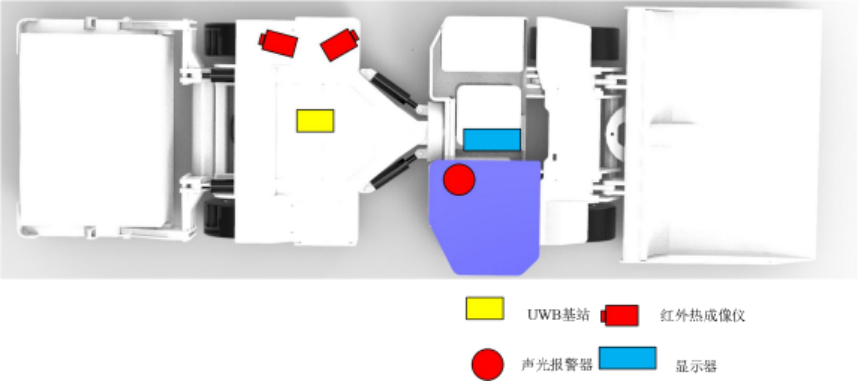
图15安装位置示意图
3.2.2工作要求
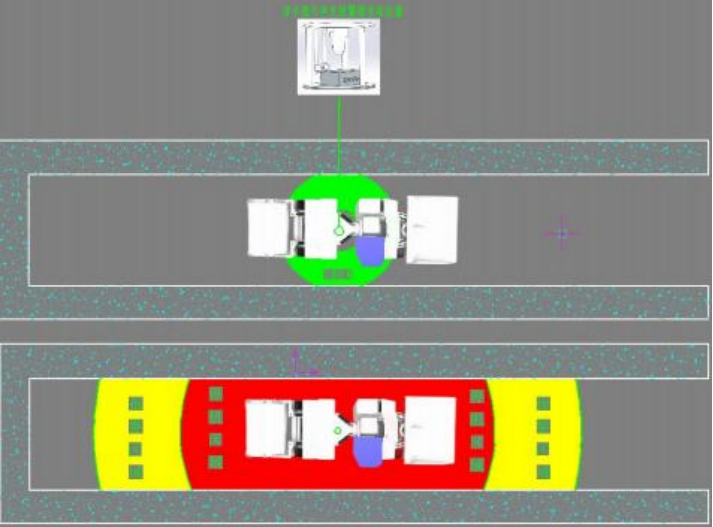
图16铲运车人员接近防护系统报警区、停机区
图中黄色区域为报警区、红色区域为停机区、绿色区域为工作人员工作区。现场非本机的作业人员进入铲运车的报警区时,系统发出报警提醒;当非本机的作业人员进入铲运车停机区时,系统瞬间自动触发铲运车的停机并报警提示,防止人员在行车过程中靠近铲运车。当司机离开工作区时,系统能够自动出发铲运车停机并发出报警提示。
建议距离铲运车的车头或车尾8m的范围(以读卡器距离设备机头或机尾较长侧距离为准)划定为报警区,距离铲运车的车头或车尾4m的范围(以读卡器距离设备机头或机尾较长侧距离为准)划定为停机区,以读卡器为圆心,2m为半径的圆形区域划定工作区。
在摄像头的监测区域内,根据现场的作业需求划定危险区域和停机区域两级电子围栏,当人员闯入铲运车的危险区域时,系统发出报警提醒;当人员闯入停机区域时,发出报警提示并自动触发铲运车的停机。
3.3装载机
3.3.1安装方式
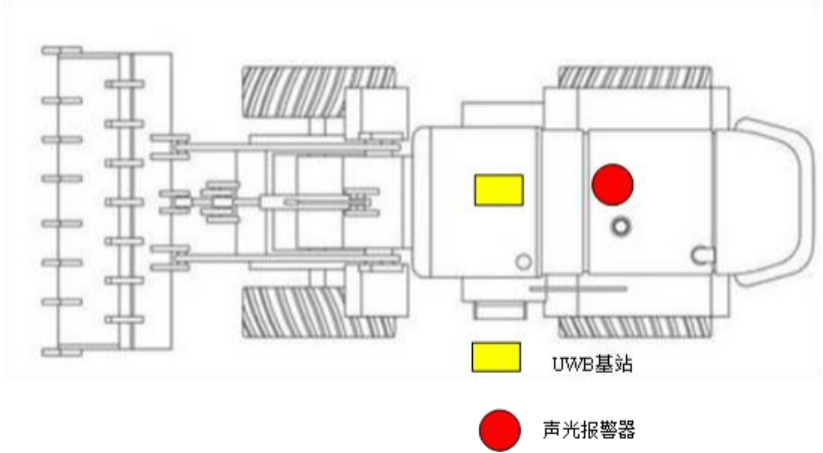
图17安装位置示意图
装载机的人员接近防护系统安装位置示意图如图17所示。UWB读卡器安装在装载机的设备中心位置,声光报警器安装在车体上显眼位置。
3.3.2工作要求
现场非本机的作业人员进入装载机的报警区时,系统发出报警提醒;当非本机的作业人员进入铲运车停机区时,系统瞬间自动触发装载机的停机并报警提示,防止人员在行车过程中靠近装载机。当司机离开工作区时,系统能够自动出发装载机停机并发出报警提示。
建议距离装载机的车头或车尾8m的范围(以读卡器距离设备车头或车尾较长侧距离为准)划定为报警区,距离装载机的车头或车尾4m的范围(以读卡器距离设备车头或车尾较长侧距离为准)划定为停机区,以读卡器为圆心,3m为半径的圆形区域划定工作区。
四、给料破碎机、联运头车
4.1安装方式
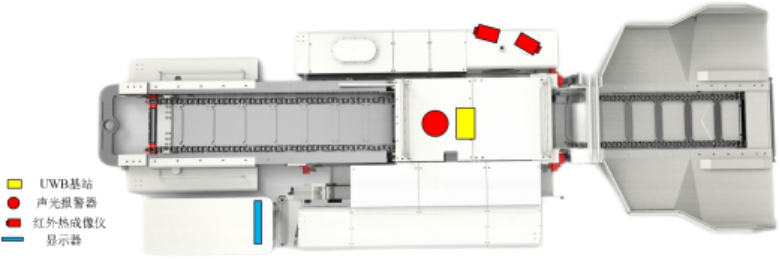
图18给料破碎机/联运头车人员接近防护系统安装示意图
给料破碎机或联运头车的人员接近防护系统安装位置示意图如图18所示。在设备驾驶室的另一侧安装基于热成像的人员安全防护系统的两路热成像仪。其中,一路热成像仪分别向向后采集司机驾驶盲区范围的行车环境图像信息,另一路对收料斗进行监控。显示器安装在驾驶室内,确保司机能清晰看见监控画面。声光报警器、UWB读卡器安装在设备中心位置,并有相应的防护罩保护措施。
4.2工作要求
图19中黄色区域为报警区、红色区域为停机区、绿色区域为工作人员工作区。外来人员进入报警区,系统自动触发料破碎机或连运头车报警提示;外来人员进入停机区,系统自动触发料破碎机或连运头车报警提示并停机。本机工作人员离开工作区时,系统自动触发料破碎机或连运头车报警提示并停机。建议距离料破碎机或连运头车的机头或机尾7m的范围(以读卡器距离设备机头或机尾较长侧距离为准)划定为报警区;距离料破碎机或连运头车的机头或机尾3m的范围(以读卡器距离设备机头或机尾较长侧距离为准)划定为停机区;以读卡器为圆心,3m-5m的环形区域划定工作区。
在油泵启动后,人员接近防护系统正常动作,人员靠近报警区域时,报警灯预警,当人员靠近停机区域后,设备停机。在只启运输机未启油泵的状态下,人员接近防护系统只预警不停机。同时针对料破碎机或联运头车单岗作业的设备,在工作区域内,有且只有1名工作人员的情况下能正常启机。
在红外热成像仪的监测区域内,根据现场的作业需求划定危险区域和停机区域两级电子围栏,当人员闯入设备的危险区域时,系统发出报警提醒;当人员闯入设备的停机区域时,发出报警提示并立即触发设备停机。
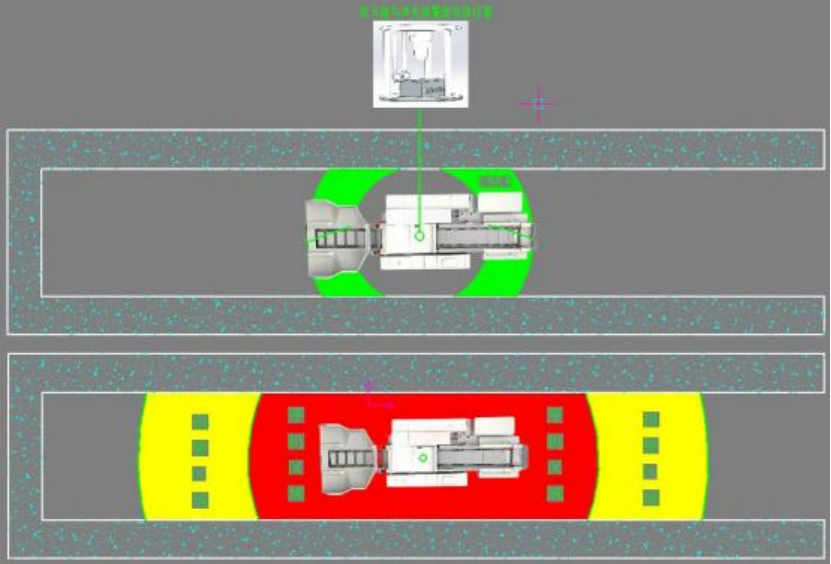
图19给料破碎机/联运头车人员接近防护系统报警区、停机区
在摄像仪的监测区域内,根据现场的作业需求划定危险区域和停机区域两级电子围栏,当人员闯入设备的危险区域时,系统发出报警提醒;当人员闯入设备的停机区域时,发出报警提示并立即触发设备停机。
五、带式输送机
5.1安装方式
煤仓或溜煤眼上口的或者下部设备带破碎机构的上一部带式输送机,在皮带机头段储带仓后方变坡点处(距离皮带卸载点大于40米)安装一台UWB基站。基站固定在顶板专用锚杆或者固定架上,距离皮带凹弧带面正上方约1m,基站接收器朝向皮带机尾带面方向。声光语音报警器安装在基站位置。在机头上安装红外热成像仪,摄像仪采集皮带运行环境的信息。
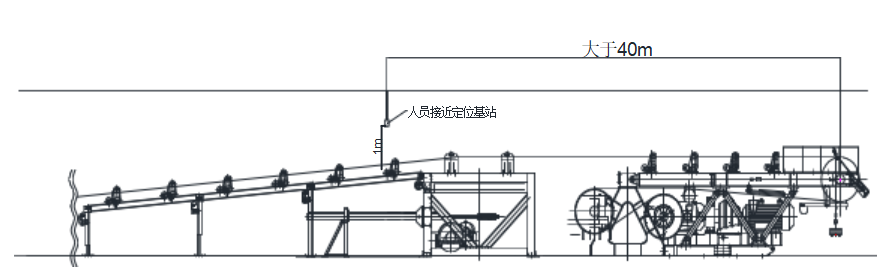 图20溜煤眼或煤仓处人员接近保护系统安装示意图
图20溜煤眼或煤仓处人员接近保护系统安装示意图
5.2工作要求
工作人员误入运行的皮带,当人员经过UWB基站的预警范围时,系统输出报警信号提醒工作人员;当人员经过停机范围时,系统瞬间自动触发运输设备停机并报警提示。通过机器视觉智能分析热成像仪的视频,根据现场的作业需求划定危险区域和停机区域两级电子围栏,当人员闯入皮带的危险区域时,系统发出报警提醒;当人员闯入皮带的停机区域时,发出报警提示并立即触发设备停机。
六、溜煤眼或煤仓上口
6.1安装方式
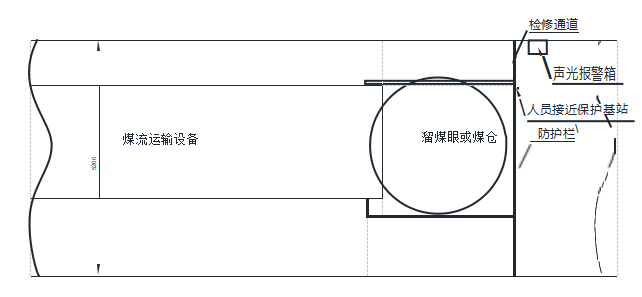
图21溜煤眼或煤仓处人员接近保护系统安装示意图
溜煤眼或煤仓上口必须设置安全可靠的防护栏,防止人员误入、翻入溜煤眼或煤仓,防护栏的检修通道开门处安装一台UWB基站。基站固定在防护栏上,距离地面约1.5m。声光语音报警器安装在检修通道门口侧巷道帮部2m以上位置。
6.2工作要求
现场人员进入溜煤眼或煤仓口等危险区域5m范围时,系统自动触发语音报警提示;人员进入危险区域1.5m范围时,系统瞬间自动触发溜煤眼或煤仓上口的运输设备停机并报警提示。当检修人员进入UWB基站的防护范围后,系统对其免报警并开始计时,当达到预定的检修时长后系统输出报警信号提醒检修人员注意。
七、密闭墙
7.1安装方式
密闭墙外必须设置防护栅栏,警示并防止人员接近密闭墙。在密闭墙栅栏上安装1台(可以调整信号接受范围,如不能,需安装2台)UWB基站,距离地面和巷道帮部约1.5m。声光语音报警箱安装在栅栏外帮部2m以上位置。
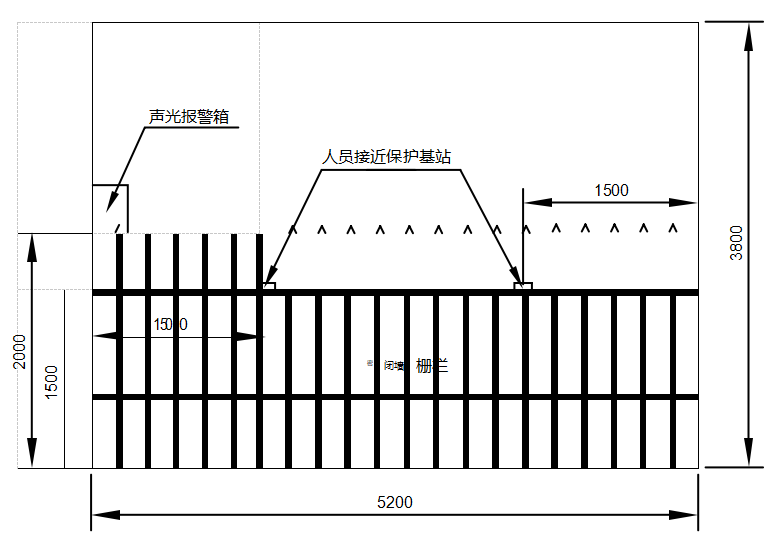
图22人员接近保护系统安装示意图
7.2工作要求
现场人员进入密闭墙5m范围时,系统自动触发进入危险区域的语音报警。
八、采煤工作面转载机入料口
8.1安装方式
在转载机入料口封闭盖板上方约0.3~0.5m安装一台UWB基站。在转载机封闭盖板上方安装声光语音报警器,声光信号在转载机的行人侧。综放工作面在刮板运输机头、上部安装一台UWB基站。在行人过桥上安装红外热释电传感器。
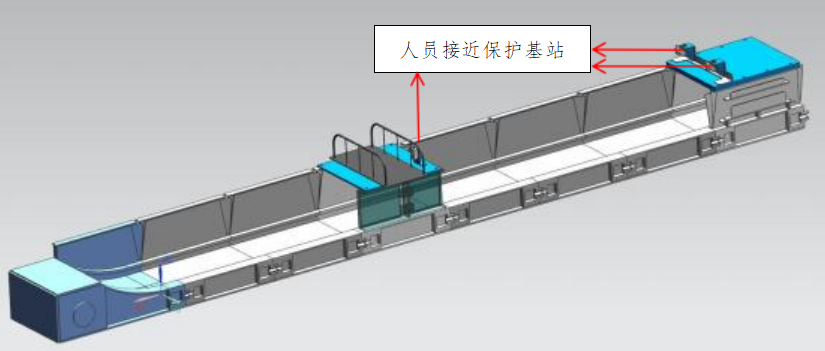
图23转载机入料口人员接近保护基站安装示意图
8.2工作要求
(1)UWB基站固定方式根据各工作面设备型号、过煤要求、实际应用情况做适当调整。
(2)现场人员进入工作面机头、转载机入料口等危险区域5m范围时,系统自动触发语音报警提示;人员进入危险区域2m范围时,系统瞬间自动触发转载机停机并报警提示。
(3)现场人员经过行人过桥时,经过红外热释电传感器的防护范围时,系统触发皮带停机并发出报警提示。
备注:安装示意及说明仅以“UWB技术”为例供各煤矿企业参考使用,不作强制使用要求。在安装“电子围栏”过程中,各煤矿企业可就多种技术广泛开展调研,并结合煤矿井下应用场景实际情况自行决定选用,只要能够实现“人员进入危险作业区域及时触发声光报警和设备停机”功能即可。

