-
全部



主办单位:煤炭科学研究总院有限公司、中国煤炭学会学术期刊工作委员会
Research on active electrohydraulic steering control of heavy duty articulated vehicles in coal mine based on yaw motion compensation
任志勇石琴赵远张磊黄振华
REN Zhiyong;SHI Qin;ZHAO Yuan;ZHANG Lei;HUANG Zhenhua
中国煤炭科工集团太原研究院有限公司合肥工业大学 汽车与交通工程学院安徽省智慧交通车路协同工程研究中心
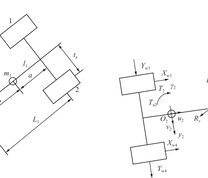
煤矿重载铰接车辆采用折腰转向,横向刚度弱且所受扰动因素复杂,操控难度加大,极易引起安全事故。为改善煤矿重型铰接车辆在湿滑低附着路面环境中的安全驾驶操控性能、进一步提升煤矿辅助运输智能化水平,设计了一种具有横摆运动反馈补偿功能的泵控电液动力转向系统。建立了包含前车体纵向、侧向、横摆及后车体横摆运动在内的铰接车辆4自由度车体动力学模型以及泵控电液转向系统数学模型,在解耦动力学模型横摆角速度与横向加速度的基础上,设计了“转向操纵跟随−横摆稳定补偿”双通道铰接转向控制策略,其中,转向操纵跟随通道可实现前后车体铰接角对驾驶员的转向操控输入的实时跟踪,而横摆稳定补偿通道则通过主动调节车体铰接角以确保实际横摆角速度逼近理想横摆角速度。通过设置预滤波器和衰减积分器,设计了主动转向控制系统,该系统通过调整转向角度来提供纠正作用,以确保车辆能够遵循驾驶员意图保持路径跟随。基于dSPACE/DS1007半实物仿真平台,对铰接矿车低附着转向工况进行了仿真测试;模拟J型转弯工况,选择低摩擦因数路面条件中低速运行,验证了主动控制器对于铰接车辆跟踪期望路径的有效性。同时,基于冰雪覆盖路面等效低附着系数路面的实验条件,利用煤矿井下 25 t 级重型铰接式支架搬运车进行了实车转弯实验;结果表明:建立的铰接车辆车体动力学模型和泵控电液转向系统模型,通过横摆角速度与横向加速度进行解耦,能够比较真实的反应该类车辆的折腰运动状态;基于铰接车辆横摆稳定性控制分析,制定的“转向操纵跟随−横摆稳定补偿”双通道铰接转向控制策略,以及设计的主动控制系统,能够有效提高铰接车辆在低附着路面工况下的横摆稳定性,且该系统对于驾驶员的驾驶感觉没有改变,主动控制干预后能够及时、安全、平稳地将车辆的驾驶权交还给驾驶员。
Due to the use of lumbar folding steering for heavy-duty articulated vehicles in coal mines, the lateral stiffness is weak and the disturbance factors are complex, making it more difficult to operate and easily causing safety problems. A new pump controlled electro-hydraulic steering system with lateral motion feedback compensation was proposed to improve the safe driving and handling performance of coal mine heavy-duty articulated vehicles in wet and low adhesion road environments, and further enhance the intelligent level of coal mine auxiliary transportation. A four-degree-of-freedom dynamics model of articulated vehicle and a mathematical model of pump-controlled electro-hydraulic steering system were established, including front body longitudinal, lateral, yaw and rear body yaw motion. Based on the yaw velocity and lateral acceleration of the decoupling dynamics model, the two-channel articulated steering control strategy of “steering control follow - yaw stability compensation” was designed. The steering control follow channel can realize the real-time tracking of the steering input of the driver by the articulated angle. The yaw stability compensation channel ensures that the actual yaw velocity is close to the ideal yaw velocity by actively adjusting the articulated angle. By setting up a pre-filters and attenuation integrator, an active steering control system was designed, which provides corrective action by adjusting the steering angle to ensure that the vehicle can follow the driver's intention and maintain path following. Based on the dSPACE/DS1007 semi physical simulation platform, some simulation tests were conducted on the low adhesion steering conditions of articulated mining vehicles. The effectiveness of the active controller for tracking the desired path of articulated vehicles was verified by simulating the J-shaped turning condition and selecting the low friction coefficient road conditions for the medium to low speed operation. Meanwhile, based on the experimental conditions of equivalent low adhesion coefficient road surface covered with ice and snow, a 25 t coal mine heavy-duty articulated support truck was used for actual vehicle turning experiments. The results show that the dynamics model of articulated vehicle and a mathematical model of pump-controlled electro-hydraulic steering system established can truly reflect the lumbar folding motion state of this type of vehicle by decoupling the yaw rate and lateral acceleration. The two-channel articulated steering control strategy of "steering control follow - yaw stability compensation" based on the analysis of articulated vehicle yaw stability control, as well as the designed active control system, can effectively improve the lateral stability of articulated vehicles under low adhesion coefficient road conditions, and the system has not changed the driver's driving experience, and after active control intervention, it can timely, safely, and smoothly hand over the vehicle's driving rights to the driver.
全液压转向系统矿山重型铰接式车辆动力学模型路径跟随控制算法
fully hydraulic steering system;heavy articulated vehicles for mining;dynamical model;path following;control algorithm
图(12) / 表(0)


主办单位:煤炭科学研究总院有限公司 中国煤炭学会学术期刊工作委员会
 煤炭学报
煤炭学报  2024年第06期
2024年第06期