-
全部



主办单位:煤炭科学研究总院有限公司、中国煤炭学会学术期刊工作委员会
Design and experimental research on the rocker arm walking mechanism of the wheeled inspection robot for the main transportation roadway of coal mines
杨瑞鲍久圣鲍周洋阴妍张磊潘国宇杨姣葛世荣
YANG Rui;BAO Jiusheng;BAO Zhouyang;YIN Yan;ZHANG Lei;PAN Guoyu;YANG Jiao;GE Shirong
中国矿业大学 机电工程学院中国矿业大学(北京)机械与电气工程学院
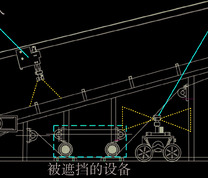
目前主运大巷带式输送机巡检机器人主要采用悬挂轨道式巡检方式,无法巡检位置较低或被遮挡的设备,难以满足井下巷道及设备的全方位巡检需求。设计了一种基于轮式巡检机器人的摇臂式行走机构,与轨道式巡检机器人配合使用,以满足全方位巡检需求。确定了轮式巡检机器人的系统结构,重点对其行走系统进行了分析,分别建立了履带式、轮履式、摇臂式3种行走机构的量化模型,利用德尔菲法与网络分析法对行走机构性能进行了综合分析,结果表明:基于摇臂式行走机构的机器人移动底盘在井下巷道环境内的行走适应性最佳。对摇臂式行走机构中的关键部件倒V型连杆进行静态性能分析,结果表明:倒V型连杆满足煤矿井下常见的坡道满载、紧急转弯、紧急制动3种工况下的强度与刚度需求。面向煤矿井下主运大巷地形特点及运输装备环境,开展模拟巷道内的机器人巡检试验,结果表明:摇臂式轮式巡检机器人在坡道、台阶、沟道的行走测试中均表现出良好的环境适应性,能够满足对煤矿井下巷道及其内部主要设备的巡检需求。
Currently, inspection robots for main transport roadway belt conveyors primarily employ a suspended track-based inspection method. However, this approach cannot inspect equipment located in lower or obstructed positions, making it difficult to meet the comprehensive inspection requirements for underground roadways and equipment. A rocker arm walking mechanism for a wheeled inspection robot was designed to complement track-based inspection robots, fulfilling the need for comprehensive inspections. The system structure of the wheeled inspection robot was determined, with a focus on analyzing its walking system. Quantitative models for three walking mechanisms—crawler, wheeled-crawler, and rocker arm—were established. The Delphi method and network analysis were employed for a comprehensive performance evaluation of the walking mechanisms. The results demonstrated that the robot’s mobile chassis, based on the rocker arm walking mechanism, had the best adaptability for walking in the underground roadway environment. Static performance analysis of the key component, the inverted V-link, in the rocker arm walking mechanism revealed that the inverted V-link met the strength and stiffness requirements for three typical working conditions in coal mines: full-load ramp, emergency turning, and emergency braking. Considering the terrain features of the main transport roadway and the environment of the transport equipment in coal mines, simulated inspection experiments were conducted in a laboratory roadway. The results showed that the rocker arm wheeled inspection robot exhibited excellent environmental adaptability during walking tests on ramps, steps, and channels, fulfilling the inspection needs for underground roadways and their main equipment in coal mines.
主运大巷轮式巡检机器人巷道巡检摇臂式行走机构履带式行走机构轮履式行走机构倒V型连杆
main transport roadway;wheeled inspection robot;roadway inspection;rocker arm walking mechanism;crawler walking mechanism;wheeled-crawler walking mechanism;inverted V-link
图(27) / 表(7)


主办单位:煤炭科学研究总院有限公司 中国煤炭学会学术期刊工作委员会
 工矿自动化
工矿自动化  2025年第01期
2025年第01期 












