-
全部



主办单位:煤炭科学研究总院有限公司、中国煤炭学会学术期刊工作委员会
赵昊马宏伟王川伟薛旭升梁林
西安科技大学机械工程学院陕西省矿山机电装备智能监测重点实验室
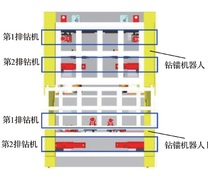
针对复杂地质条件煤矿巷道存在的掘快支慢难题,提出一种集钻、护、锚于一体的多履带钻锚机器人群。依据巷道支护需求,设计钻锚机器人本体结构、钻机布置以及支护工艺,完成钻锚机器人三维建模;基于D-H法建立钻锚机器人钻机运动学模型,分析并求解顶板钻机与侧帮钻机正运动学解和逆运动学解,仿真得到钻机可支护区域的点状云图、末端运动轨迹等。结果表明顶部与侧帮钻机支护作业中能够避免钻机与机器人本体之间的干涉,实现准确、平稳运动至待支护位置,具有较强的稳定性和可靠性。
钻锚机器人机器人群钻机运动学分析轨迹规划
1 钻锚机器人的结构设计
2 钻锚机器人钻机布置与钻锚工艺
3 钻锚机器人运动学分析
3.1 钻机机构正运动学分析
3.1.1 顶钻机构正运动学分析
3.1.2 帮钻机构正运动学分析
3.2 钻机机构逆运动学分析
3.2.1 左顶钻机机构逆运动学分析
3.2.2 左帮钻机机构逆运动学分析
4 钻锚机器人工作空间分析
5 钻机机构轨迹规划
6 结论
图(12) / 表(0)


主办单位:煤炭科学研究总院有限公司 中国煤炭学会学术期刊工作委员会
 煤炭工程
煤炭工程  2022年第02期
2022年第02期 












